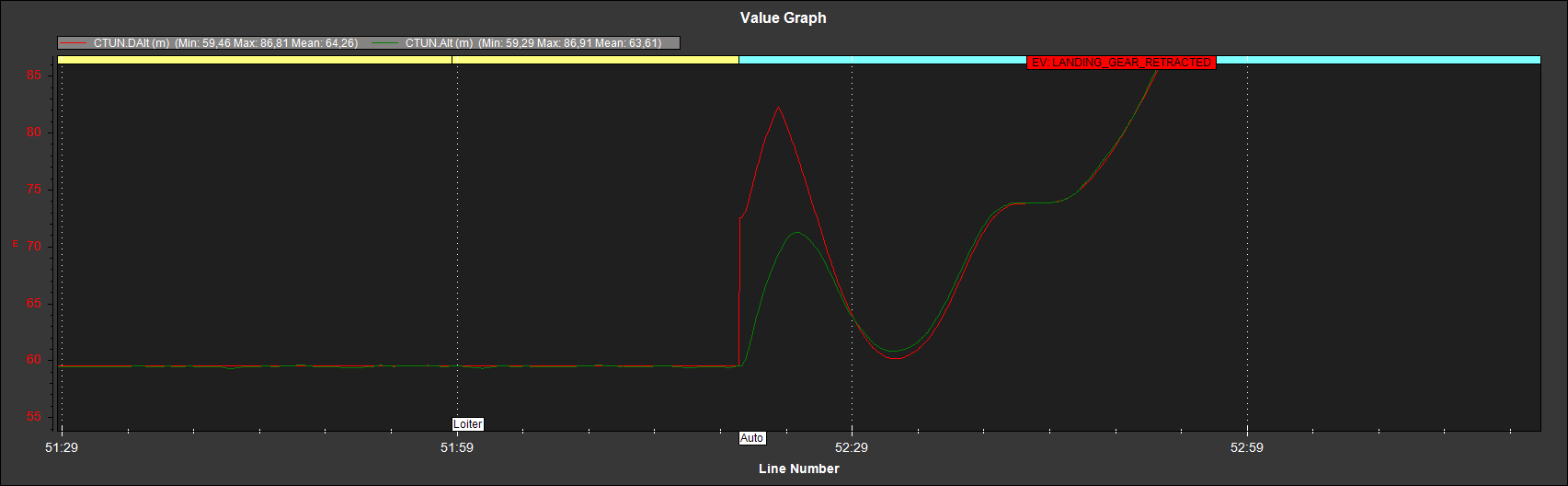
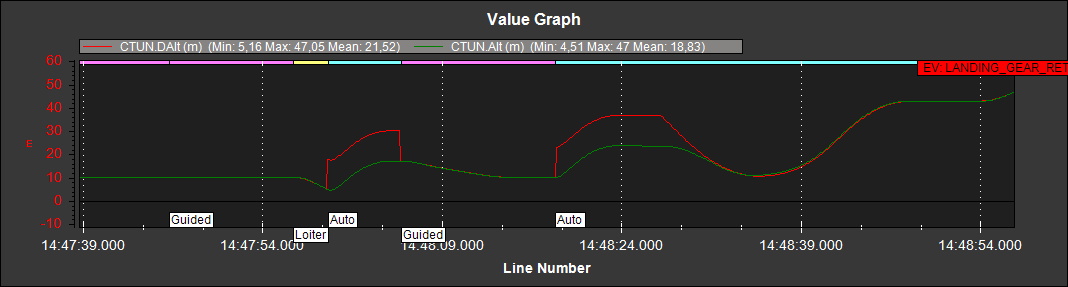
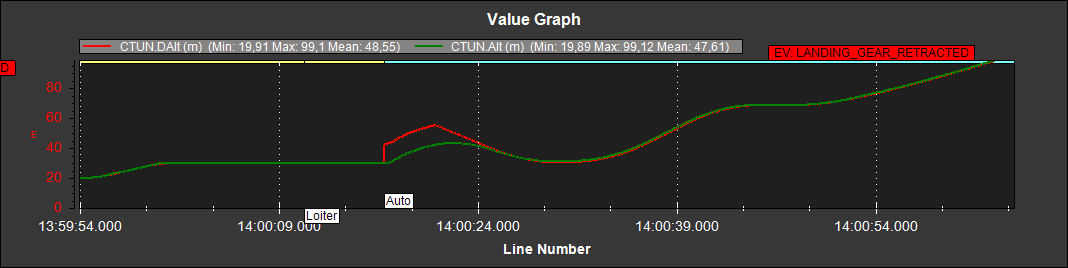
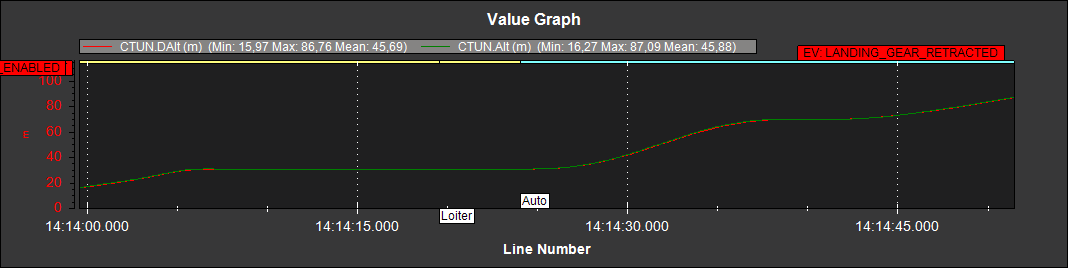
If I create a mission starting with a takeoff command with a terrain altitude frame and then manually fly to somewhere, where the terrain is either higher, or lower than at takeoff, there will be huge jump in the desired altitude when switching to AUTO followed by an agressive and strange reaction from the copter.
I have a similar problem on my drone (AC4.1.3) and I would like to download the code with your fix.
how can I do that? do you have an image (.apj) file with that fix?
(don’t want to upgrade to a different version, just stay with 4.1.3 and fix this specific problem).