To date, I’ve never been able to achieve “target acquired” with the IR-LOCK. I’ve been testing again with 3.5.4. I have a LIDAR-LITE that works fine. Dataflash always shows precision landing health as 1, but “target acquired” is always zero in both Land and Loiter (using the switch 39 mode). Is there a recommended procedure for testing this on the bench that is known to work? I have the original square beacon. Thanks very much!
On the bench, first test to see if your Pixy cam is detecting the beacon. When it has the beacon in view, the Pixy’s LED will light up red. If it does, then your IRLock hardware is working properly, and there is either a communication error (check the cable) or a software setup error (check params).
If the LED does not light up, then you will need to check your IRLock hardware. Make sure the lens is focused (IRLock has instructions on their site). Also, if you have the old square beacon, then only the old IRLock Pixy firmware will work - if you bought the Pixy recently, it probably has the newer firmware which will only work with the MarkOne beacon.
I’ve had this around for a while. So the 1.0.0 firmware should work with the square beacon but the 1.0.1 firmware would not? Thanks!
Turns out I have 1.0.0 installed, and I think it’s now working, at least I’m getting data. Thanks again.
Hi, after many months i have found the rigth solution!!!
the firmware 1.0.0 works correctly!
Hi,I encountered the same problem,would you want to share your solution?Thank you very much!
Does the Pixy’s LED flash red when you put the beacon in front of the camera? If not, make sure you have the right firmware installed on your Pixy. You will need version 1.0.3 if you are using a MarkOne beacon.
I use the firmware 1.0.1,maybe it works correctly!The “Tacq” is 1.But where it lands depends GPS not IR-LOCK.Is it because of some parameters setting error? Thanks!
Yes, it must be some parameter settings that are not right, If Tacq = 1 and PL.pY and pX show some values, then the IRLock is working properly.
Make sure you have the following settings:
PLND_ENABLED = 1
PLND_TYPE = 2
PLND_BUS = depends on your hardware. If you use Pixhawk, then set this to 0 or -1. If you use Pixhawk 2.1 Cube, then set this to 1 if you are using the I2C port.
PLND_EST_TYPE = 0. Setting this to 1 will work, however I think it is still experimental.
If this does not work, please upload a .bin log so we can help find the problem.
1 Like
Hi,i don’t change everything,but the Tacq = 0 and Heal =0,what’s wrong with it? TANKS!!!
2018-03-31 10-15-56.bin (691.4 KB)
Does the LED on the Pixy turn red when it is looking at the beacon?
Thanks.It finally worked, with the same as the previous parameters.I don’t know where the problem can be found.And i want to know the range of PIXY can see the beacon?If it out of the range,how can i let my plane return by IR-LOCK.Does it can return the range by GPS,then accurate landing by IR-LOCK?Thanks so much!
Sincerely!
In good conditions, the MarkOne beacon can be detected up to 20-25 meters. You should be able to get at least 15 meters in most situations.
And yes, if the drone is out of range, it will begin landing by using GPS, then start following the beacon once it is detected.
OK,thanks very much!
Hi,
I have some problems.The log shows Tacq = 1 and pY shows some values.But sometimes it works, and sometimes not.Does the wind have an impact on precision landing?Or it can’t land 100% successfully.I am very confused.Would you want to help me find the problem?
THANK YOU!
2018-04-09 11-52-23.bin (955.8 KB)
Hm, the IR-Lock seems to be working properly.
In ArduCopter 3.5, the precision landing function requires a rangefinder to work properly. I am not certain if a short range sonar is good enough - you might need something with more range like a lidar, such as the TFMini or LightWare. I use ArduCopter 3.4, so I am not sure if this is the problem, but I have heard that a long range rangefinder might be needed.
Does the sonar is enough on 3.4?And i don’t think this is the problem.Because when it is at a height of about 3 m,it seems to be finding the beacon.But when it landed, it stayed away from the beacon more than 4 m.And under the same conditions,it can land accurately sometimes.
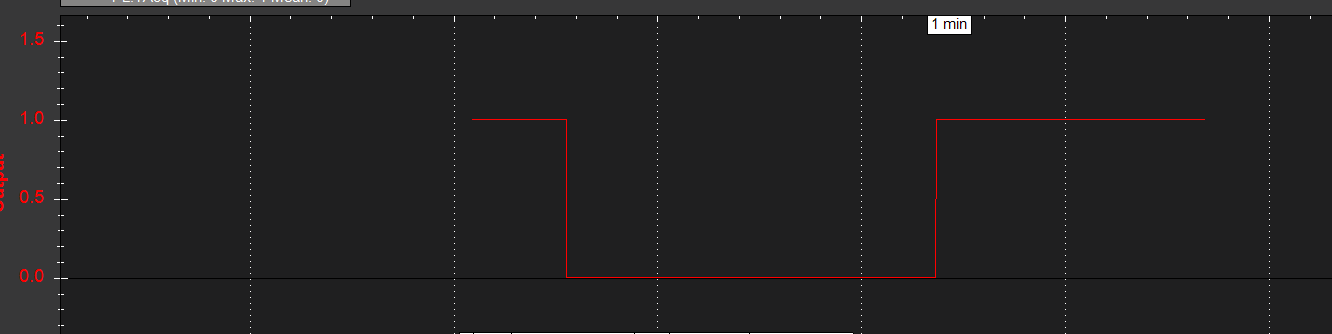
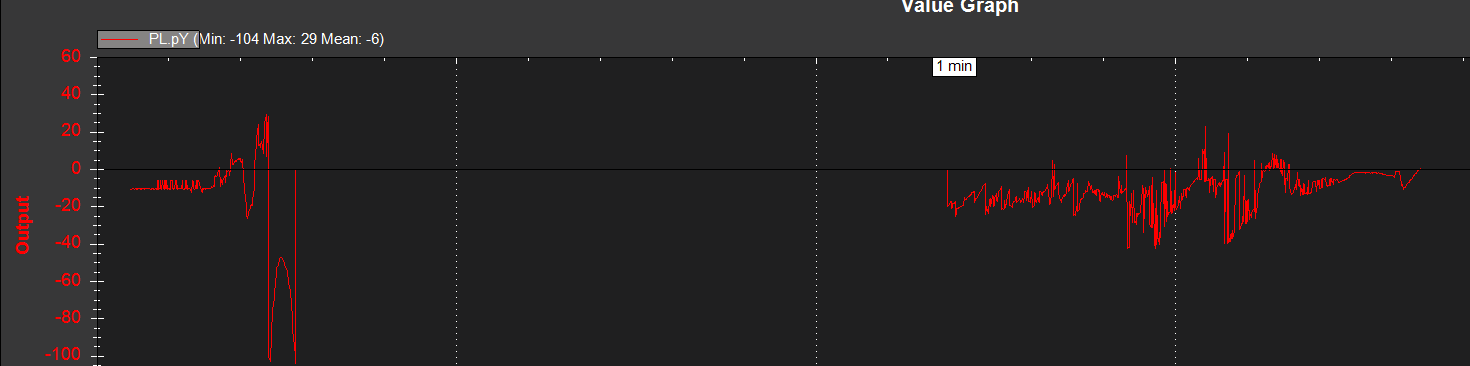
Was this log a good landing? It looks like it landed on the beacon:
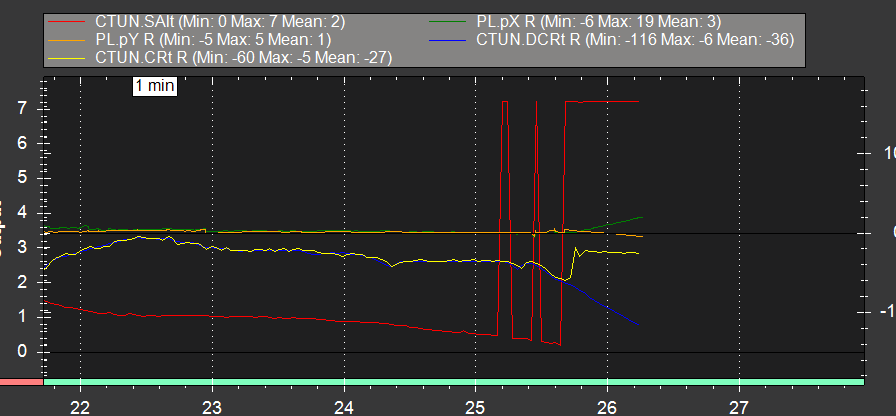
pY shows that the drone was only 2 centimeters from the beacon when it landed. Is that true? Do you have a log of a bad landing?
1 Like
It’s a bad landing.The drone was 4 meters from the beacon when it landed actually. When it above the beacon about 3-4meters the drone will be adjusted.Maybe it was only 2cm.The final landing process will be far away from the beacon