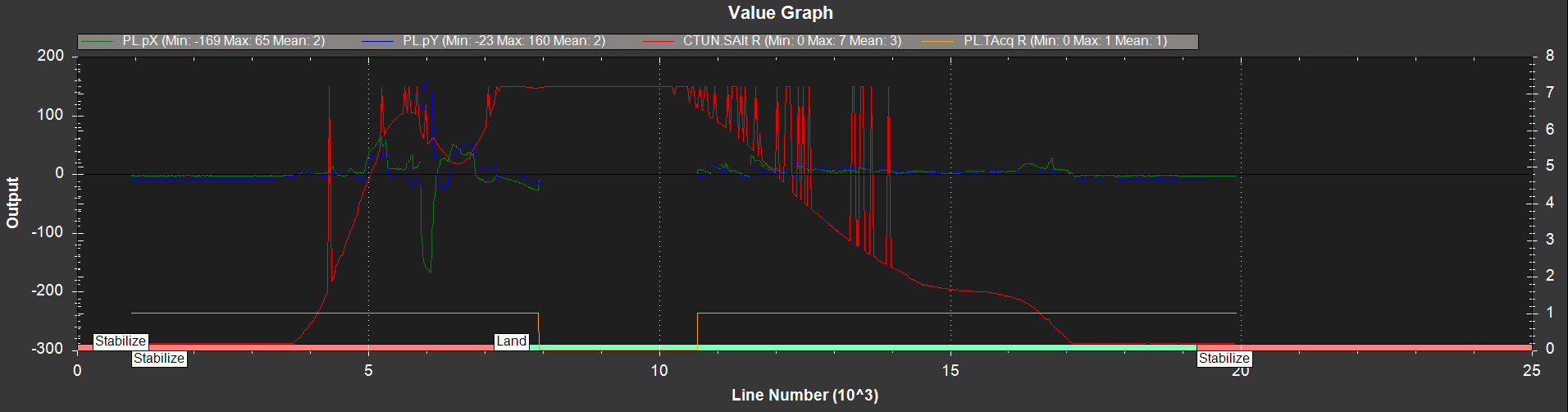
Hm,it was a good landing in the log.But it was bad in fact.I don’t know the reason.And what causes glitches on the CTUN.SALT?Is it the quality of the sonar?This is today’s log.It’s also bad.
THANKS very much.2018-04-11 11-33-40.bin (727.5 KB)
Can you describe exactly what you mean when you say that the landing is bad? Maybe take a video.
Also, the sonar glitches in the last log might be because you were flying over grass. Sonar does not work very well on grass. On this log, it looks like you were flying over pavement, so the sonar works better.
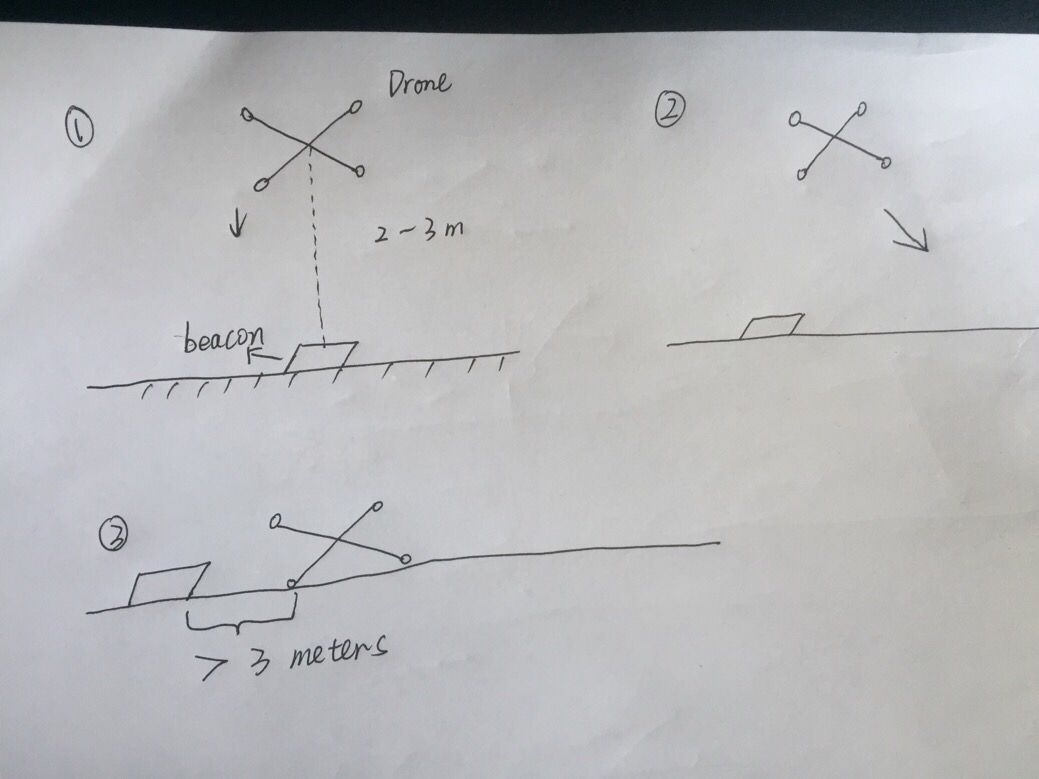
1.When the drone strikes a certain height above the beacon, it looks for the beacon. It seems to have found the beacon.
2.But when it lands, it is far away from the beacon
3.The drone is far from the beacon when it lands successfully.
In the logs, the drone is still detecting the beacon after it has landed. This means that the Pixy camera is still looking at the beacon. If the drone is 3 meters away, how is this possible?
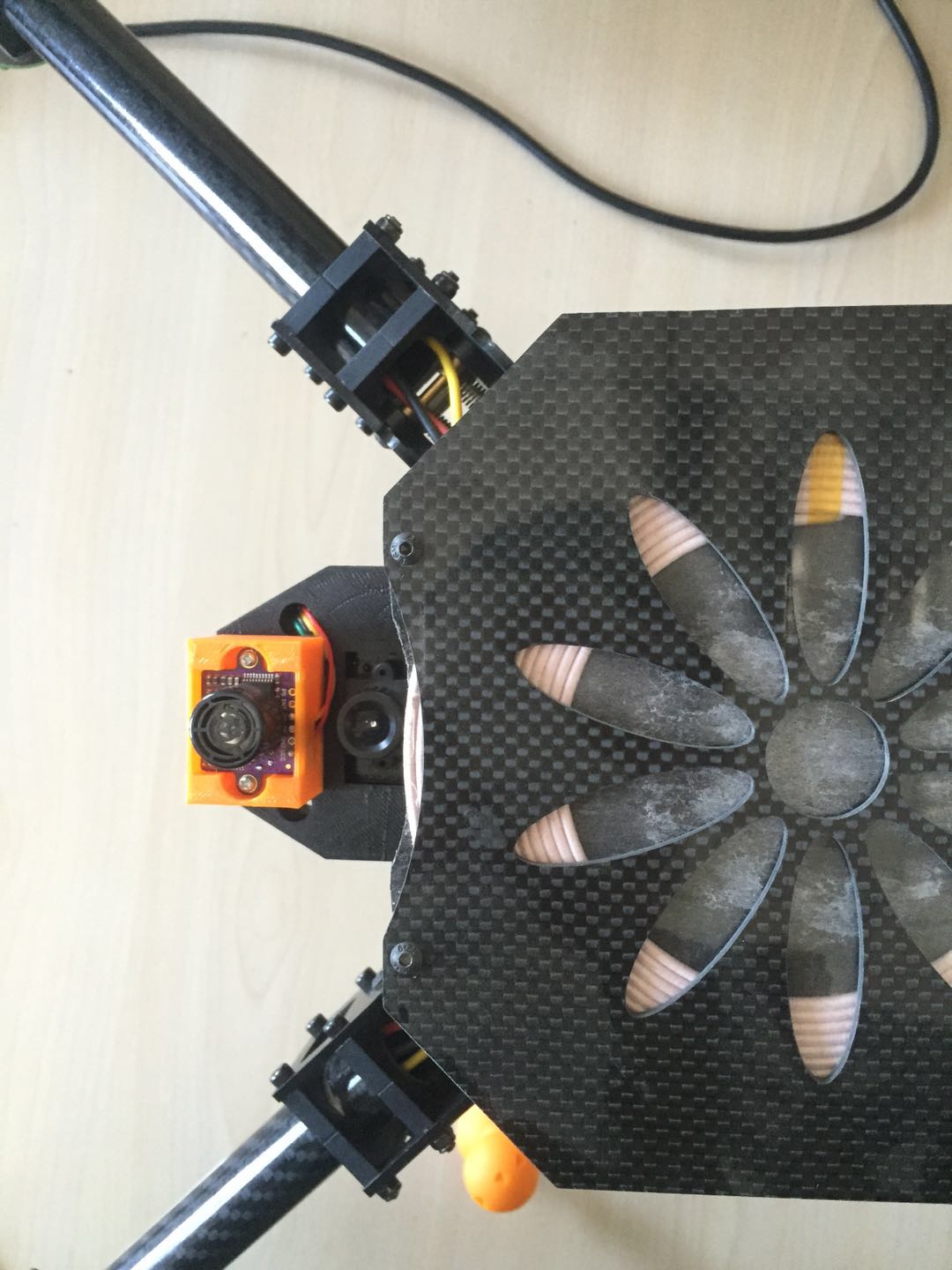
Can you post a picture of how you mounted the Pixy camera?
That looks fine, but I still don’t understand how it’s possible for the Pixy to see the beacon after it landed 3 meters away! It’s hard for me to see what is wrong because the landings look good in the logs.
Yes,that is a wireless charging coil.But it’s not working at present.
What causes the “Bad Vision Position” to appear on the HUD? I unplug the I2C bus and the HUD still shows that.
The Pixy can’t see the beacon after it landed 3 meters away in theory .Is there a problem with pixhawk?I am very confused.
I am confused also. If the Pixy is detecting something, but the drone is landed 3 meters away from the beacon, it must not be detecting the beacon.
Try using Pixymon to see what the Pixy sees. If you use the “raw” video mode in Pixymon, you might be able to identify what the Pixy is detecting, such as reflections of the beacon.
I am not sure what might be causing the Bad Vision Position error.
By the way, be careful about putting things near the Pixy lens, because nearby obstructions can reflect the beacon. This probably isn’t causing the problem, but you should be aware of this:
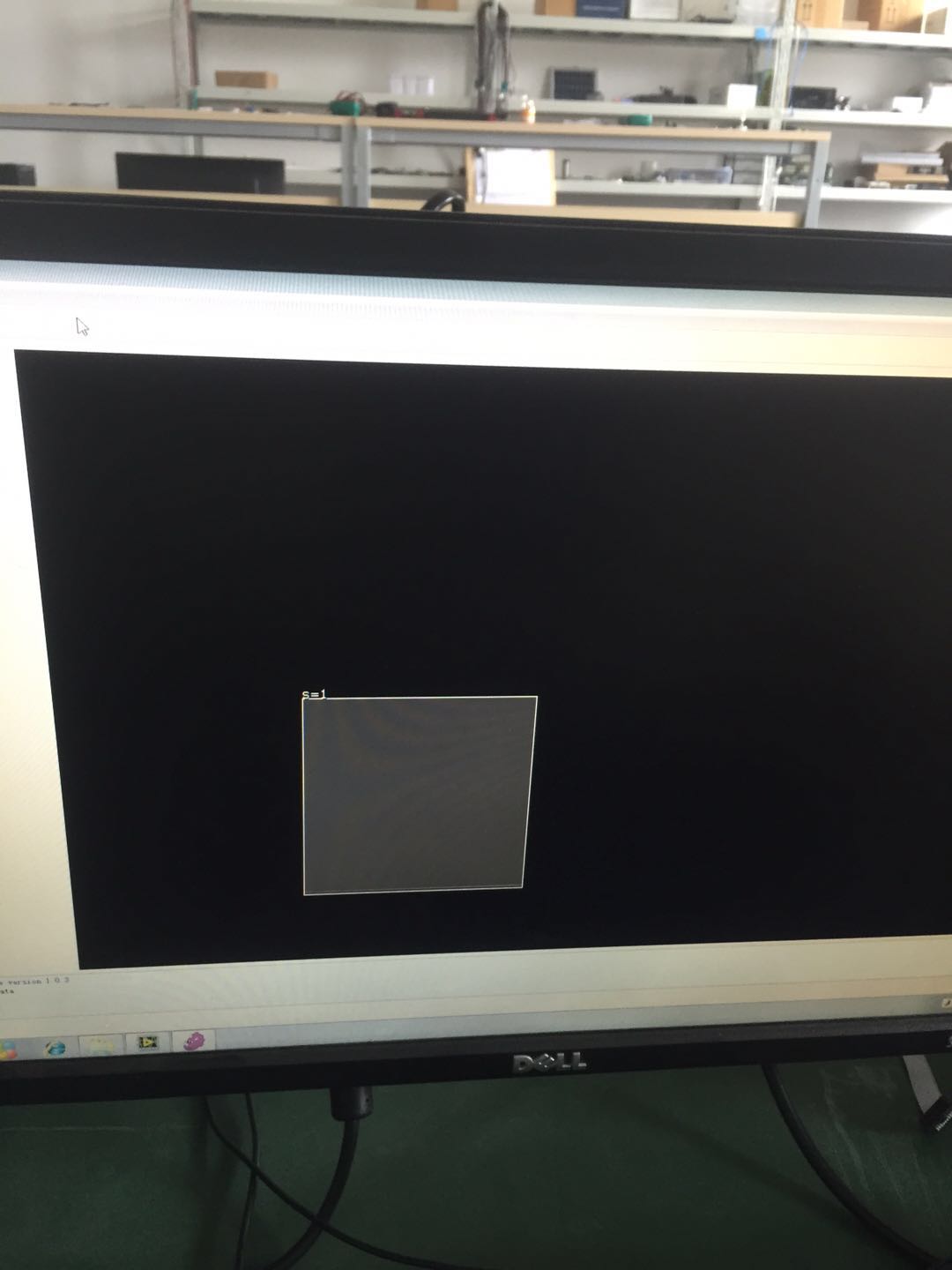
This is the image on pixymon.Pixy is about 1 meter high from the beacon.
This may not be a reflection issue.Because we have tried many times in different environments.It’s the same result.
No, it does not need to see the beacon at takeoff.
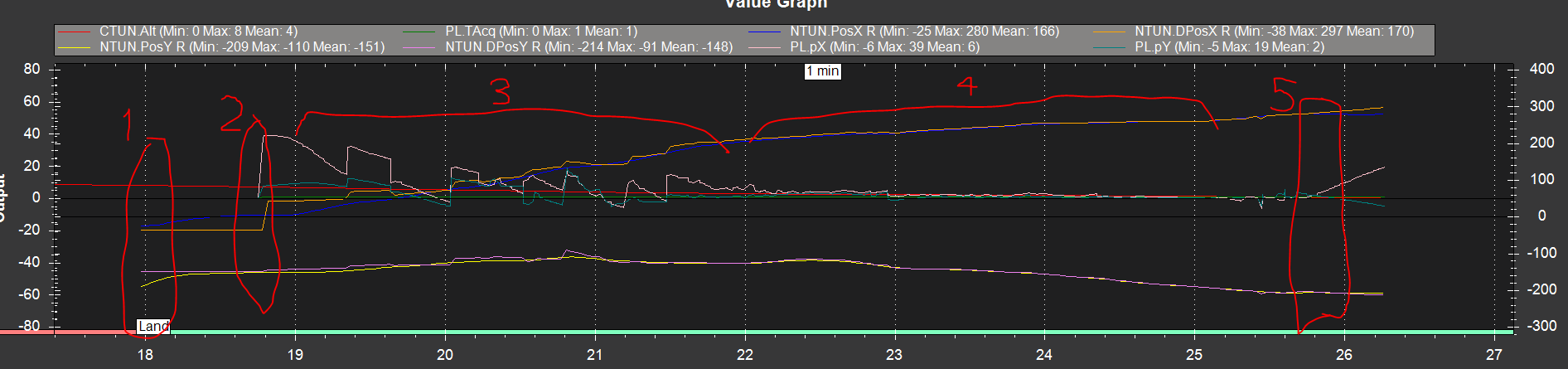
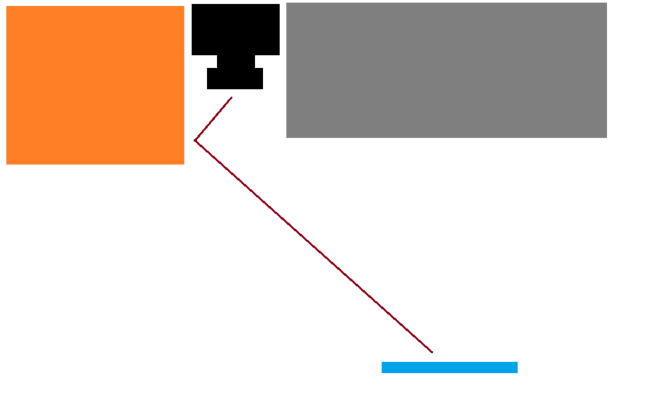
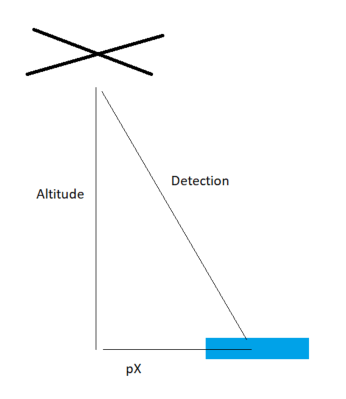
The drone uses GPS to return to home, and uses GPS while landing. Once the beacon is detected, the flight controller calculates the distance offset pX and pY by using altitude and the location of the detected beacon:
It then tells the drone to adjust its position by this offset. In the logs, you can see the drone’s current position and desired position in NTUN.PosX, PosY and NTUN.DPosX, DPosY.
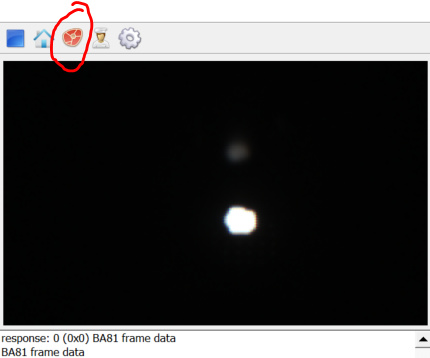
In Pixymon, you can use the “raw video” button to see what it sees:
This makes it easier to see if there are problems with reflection or environment.
The raw video button doesn’t change the behavior of the Pixy, it just allows you to see the video. This is useful for focusing the lens or diagnosing problems with reflection or something.
I found the problem.As you said the problem is reflection.When the PIXY lose the beacon,the “Tacq” also is 1.The camera lens is too sensitive to sunlight.Whether I am in the grass or the street experiment.The IR-LOCK works only well at night.Is it useful if I add an infrared filter to the lens?
Interesting, that looks like an early version of the wireless MarkOne.
I asked because the MarkOne beacons pulse the LEDs at a particular frequency, and the Pixy should only detect infrared sources at that frequency. In other words, sunlight should never result in Tacq =1. Only the beacon will result in detection, or a reflection of the beacon. That is why I mentioned using the raw video mode on PixyMon - you can use it to see exactly what the Pixy sees, then use the “Home” button to see if it is detecting anything.
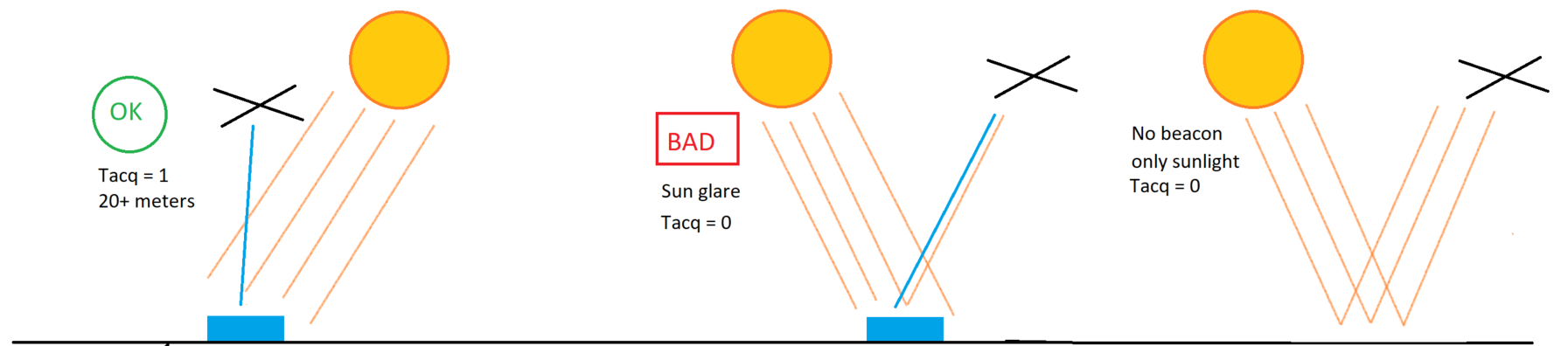
Sunlight is usually only a problem when the sun is directly reflecting towards the Pixy. But again, that should result in NO detection:
But my conclusion is that “No beacon” and “only sunlight”,Tacq = 1.That’s why the Pixy to see the beacon after it landed 3 meters away.
And I use the raw video mode on PixyMon,I can see the sun’s reflected light.The Pixy’s firmware is “firmware_IRLOCKpixy_1.0.1”,is it useful on high firmware?Does the PIXY’s camera lens have special requirements?