By the way, @jschall is working on a patch that allows using either the older method or the mini-EKF method.
If anybody is having problems though (i.e. @fingadar) it really is best to post a dataflash log. The more data we have the better but also the issue you’re facing might be completely different than the drifting issue being reported by others.
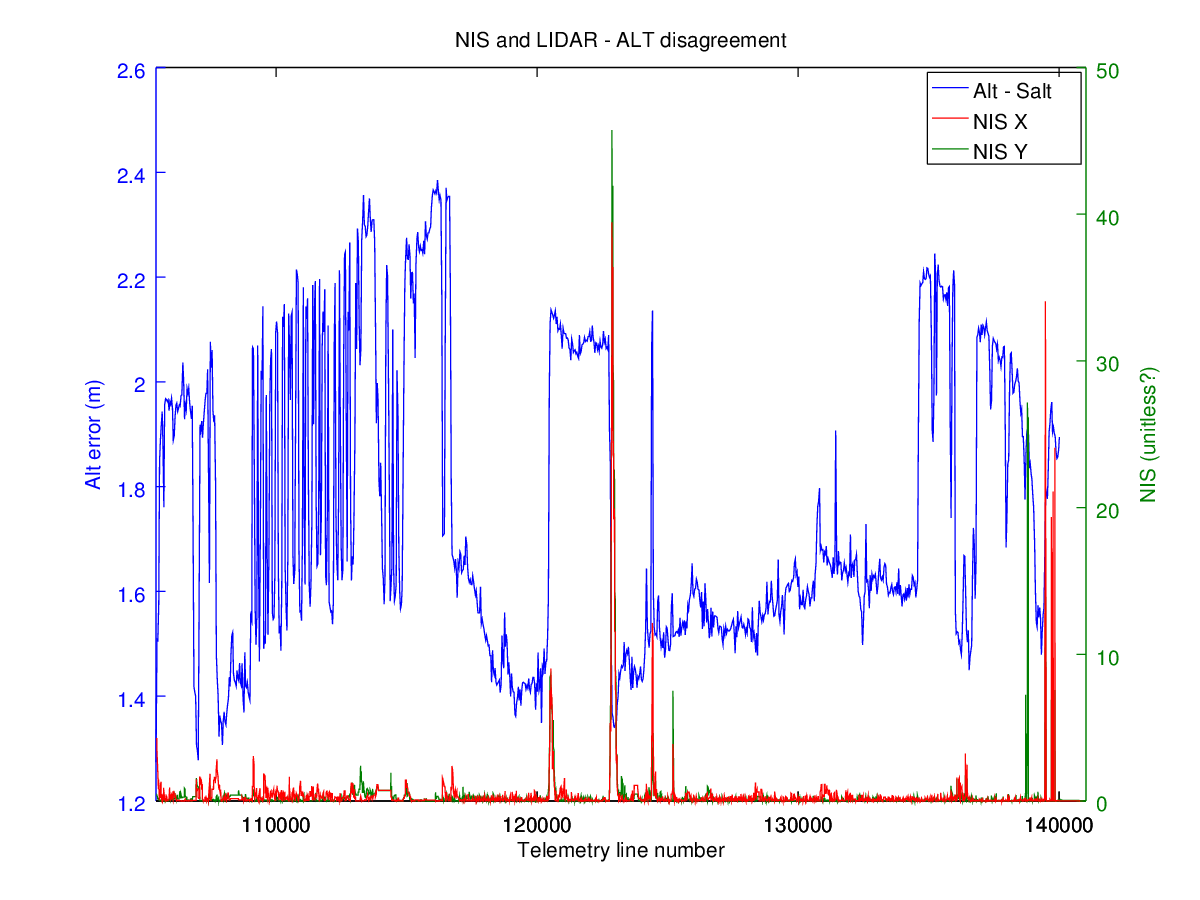
I wanted to shed some more light on this discussion as this is very interesting for me. I instrumented the Copter-3.4.3 branch to record the NIS value calculated by the precision landing Kalman filter to dataflash. I thought this would give me a lot of insight into what’s going on. I had a suspicion that the filter was diverging close to the target and causing some last minute drift. I think I was able to confirm my suspicions and find a smoking gun/root cause for this issue. The precision landing uses raw laser range finder data as its height measurement. However, I do see a fair bit of “bouncing” in the LIDAR measurement (multipath/interference/something else?). I am on the SF10/A system. Most telling I plotted the Alt - SAlt (difference b/w sensor fused altitude and raw LIDAR) against the NIS value and created this plot:
As you can see in the plot these little LIDAR jumps cause the NIS value to ride up. However, while the magnitude of the jumps does not seem to change, their effect on the filter increases as the altitude decreases. I.e. a .5m change when the system is 3m high isn’t a big deal, but when it’s 1m above the target, it is.
I have several questions/comments based on this. First of all, does anyone have a clear root cause for the cause of these jumps? Is this solvable or just a fact of life with LIDAR systems, or are they unique to my use-case and nobody has ever seen this before? If this is a real issue that’s not unique to me any suggested solutions/paths forward?
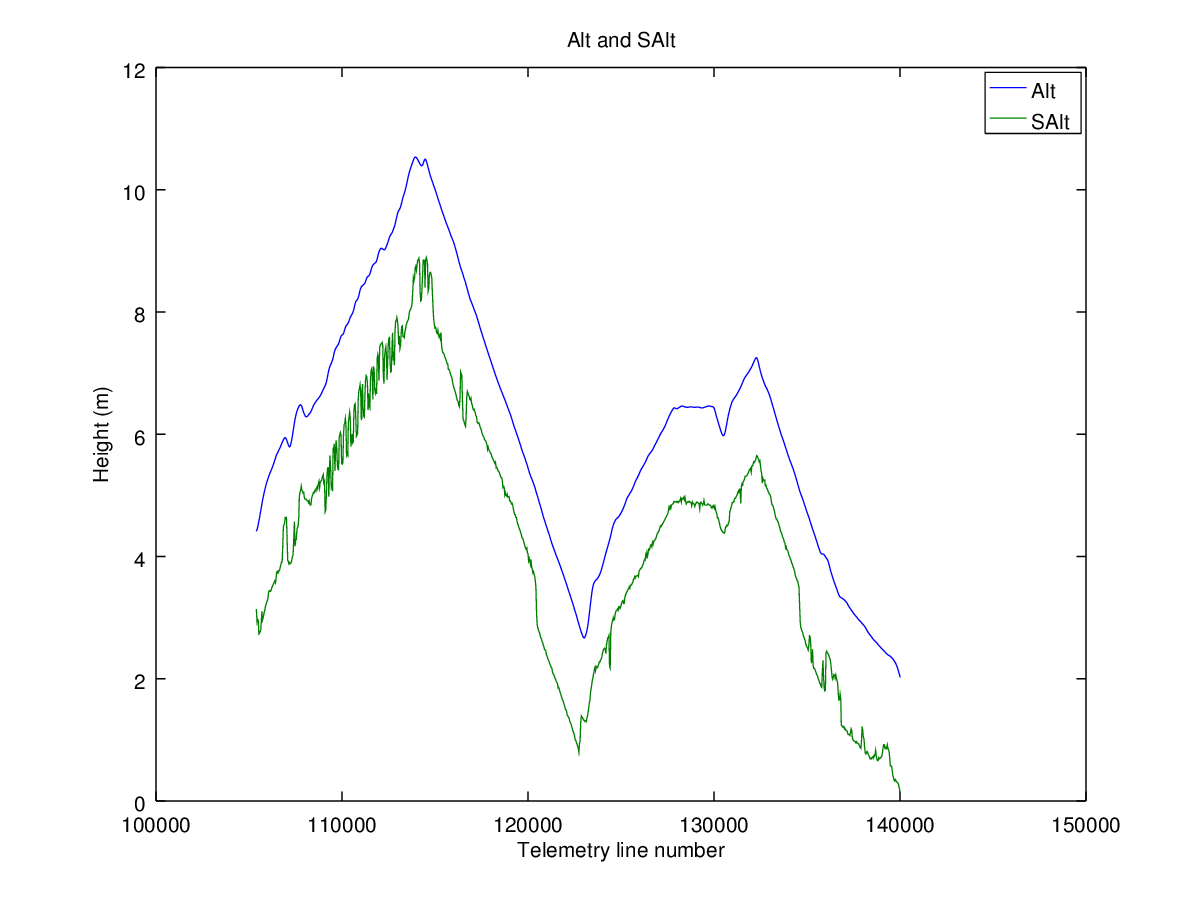
I am attaching a plot of altitude and SAlt below for reference.
@lenorin - The cause of the interference in the LiDAR reading is that the IR beacon transmits very high energy at the same wavelength as the laser used by most LiDAR systems. This means that it can go straight through the optical filter in front of the receiver.
Normally this wouldn’t be a problem but unfortunately the IR signal is modulated so the LiDAR receiver sees very fast changes in background light conditions ranging from none at all when the beacon is is transmitting a “space” to an intensity higher than that produced by sunlight aimed directly into the lenses when it is transmitting a “mark”.
Changes in background light are automatically compensated for inside the LiDAR but the IR beacon is too extreme and too fast to allow the compensation to work properly. The closer the LiDAR gets to the beacon, the more pronounced this effect becomes.
One solution is to mount the LiDAR so that it aims slightly away from the beacon when close to the ground. Whilst this doesn’t stop the energy from reaching the LiDAR, it does prevent the energy from being focussed directly onto the receiver.
We are working with ThomasSFL to make sure that our future products are more compatible with the IR beacon.
@Laser_Developer thanks so much for your response. That is immensely helpful. With regards to your suggestion of mounting the system to minimize the possibility of this interference. Can I ask what is the effective “FOV” so to speak of the laser altimeter? Is there a magical angle past which the IR from the IRLock beacon is either not visible or filtered out?
I am looking forward to new products from LightWare, and have a ton of respect for your product. In the meantime, I will attempt to put a low pass filter on the LiDAR measurement and see if that may help somewhat.
@lenorin - Thank you for your support :). We wouldn’t be able to produce great products without great customers like you who highlight problems and guide our research efforts in the right direction.
Tests with the SF10/A below 1m from the IR beacon indicate that the critical angle for getting the laser to work consistently is between 5 and 8 degrees. This seems to vary depending on where the laser is in the IR beam and how perpendicular the face of the IR beacon is to the laser. At greater distances the critical angle is smaller.
This variation in the sensitivity of the mounting angle of the SF10/A may explain why some people have had no problems whilst others may consistently get erratic results at close range - it just depends where the laser is mounted on the airframe and in what direction it is aiming.
jschall thanks for your comment! That’s very helpful to know/understand. If
you need people to beta-test new versions of the algorithms for you
definitely drop me a line.
I actually saw this issue today, even a slight breeze seems to cause a
pretty profound effect on the accuracy of the landing. I’m studying the
logs a bit closer atm, will post if there is anything exciting.
A short update … I installed IR-Lock with Arducopter 3.4.5 on my hexa (5kg class) together with a Lightware SF11/c and I’m getting very decent results. The landing point is about 5cm away from the original starting position.
I made a short video for demonstration: https://vimeo.com/210619949
To date, I’ve never been able to achieve “target acquired” with the IR-LOCK. I’ve been testing again with 3.5.4. I have a LIDAR-LITE that works fine. Dataflash always shows precision landing health as 1, but “target acquired” is always zero in both Land and Loiter (using the switch 39 mode). Is there a recommended procedure for testing this on the bench that is known to work? I have the original square beacon. Thanks very much!
"Normally this wouldn’t be a problem but unfortunately the IR signal is modulated so the LiDAR receiver sees very fast changes in background light conditions ranging from none at all when the beacon is is transmitting a “space” to an intensity higher than that produced by sunlight aimed directly into the lenses when it is transmitting a “mark” … "
I can’t help but wonder about eye safety issues with these kinds of IR beacons. – “intensity higher than that produced by sunlight”? I’ve seen the literature on this but it’s quite nontrivial to parse into a real-world context.
@ThomasSFL Hello! I currently bought an IR Lock and a Mark One beacon to use it on a quadcopter for precision loiter missions. From the forums, I was able to see that I can use the precision setting with Copter 3.3, but it lacks the precision loiter setting, which is what I need for my UAV to do as its mission. I can have this option with Copter 3.5, but I need to use a rangefinder. Sadly, I don’t have the budget for the one you previously have recommended (LightWare SF20). Are there any other rangefinders that I can choose from to be able to use precision loiter in Copter 3.5?
There are not any other rangefinders that we strongly recommend. The LW20/SF20 rangefinders are by far the most compatible with the MarkOneV2.0 Beacon.
I know that other users have conducted successful PL tests with other laser rangefinders. I think LIDAR-Lite is a popular choice. However, I wouldn’t recommend it for commercial use.
hello, I also face the same issue ( Bad vision position) but it seems something like different
i am working on precision landing so i tried to use EMLID RTK for more precision
the problem here is when i use regular GPS and IR-Lock it is working but if use IR-Lock along with RTK is is showing bad vision position
can you please help me i solve this, i was trying to solve this for long time but no result
Hey Guys, Am Yazan, I currently have an FYP project on precision landing…I have a drone with pixhawk controller (2.4.8) and i have TFmini S , Ir lock , and markone beacone …am facing hard time to find a video to connected those components and configure them on Qgroundcontrol…do anybody have a video ?