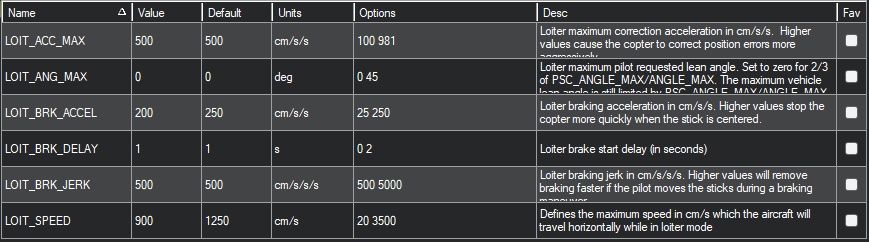
hi i have attached a log could you please help me while hovering it looks normal and stable but when i gain altitude or when drone flies above 7m/s speed it becomes quiet imabalance in loiter mode and in auto and rtl it works good.
when i fly at 8m/s and leaves the pitch back to middle on controller drone brakes or stops aggressively also auto tune is failing sayes auto tune failing to level.