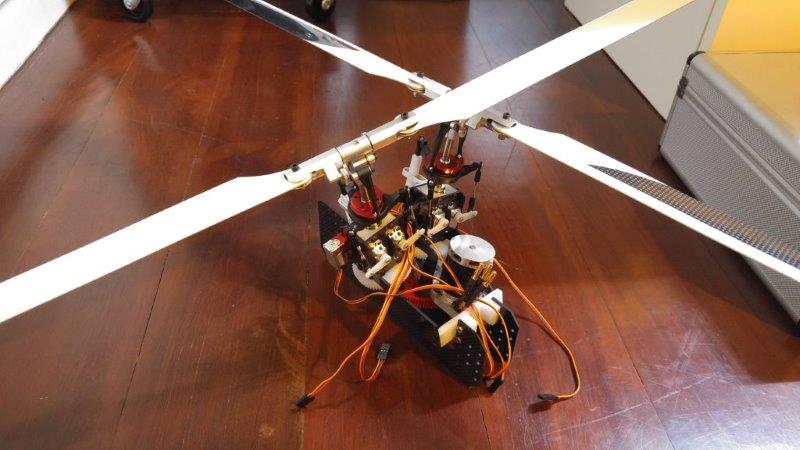
Just decided to show off this 2 years project.
Reasons: build a tailless helicopter because they look bad@$$ and just because I can.
I don’t take a lot of note and photo, These are all pics I have.
Project start: July 19, 2015
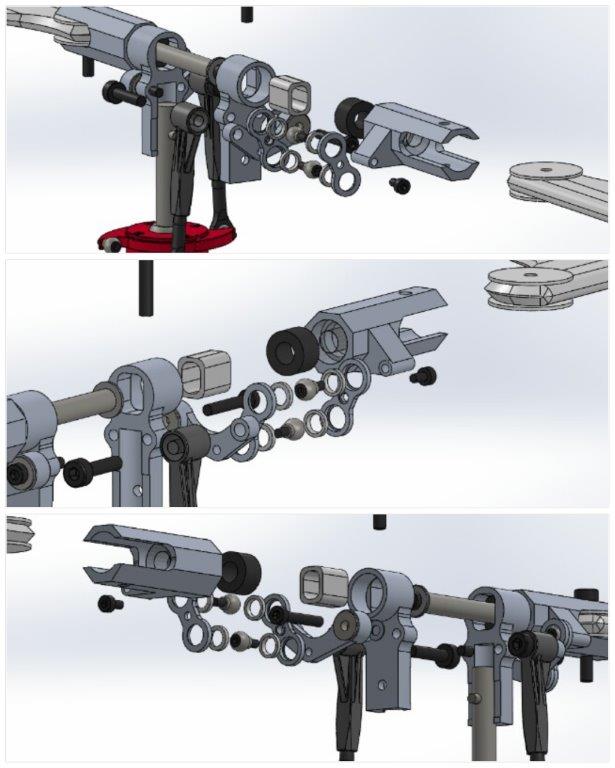
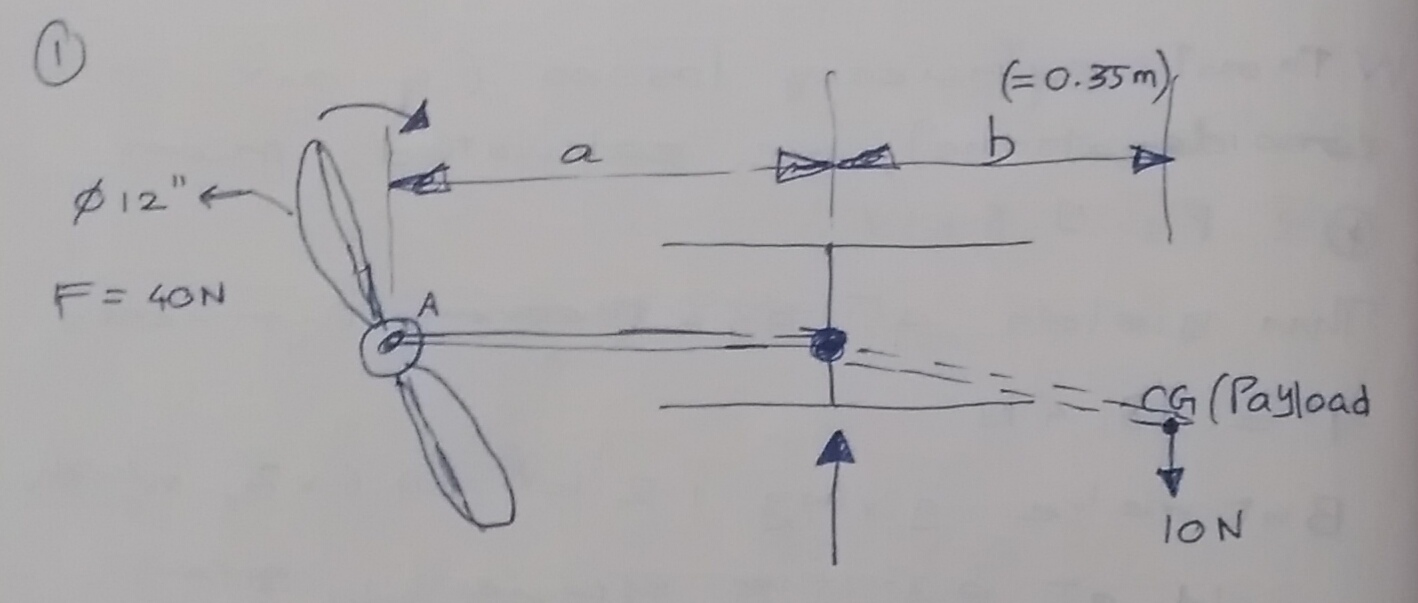
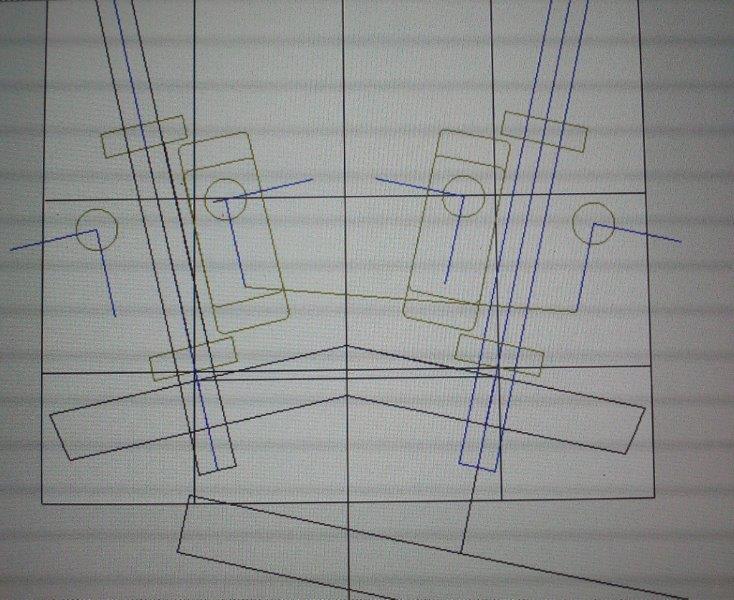
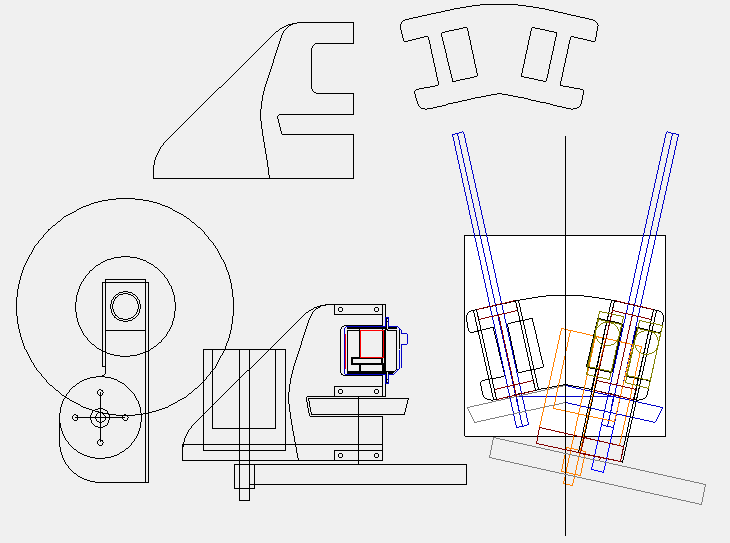
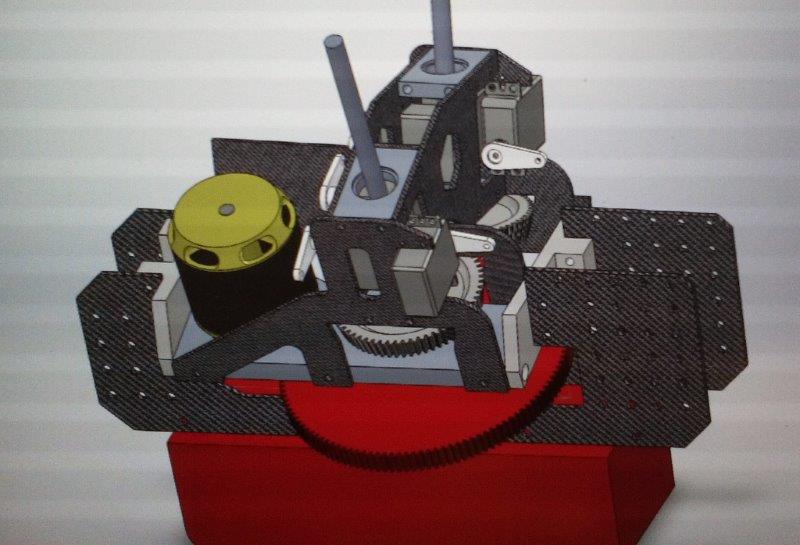
Some line drawings (initially designed to use 4 servos)

September 3, 2015
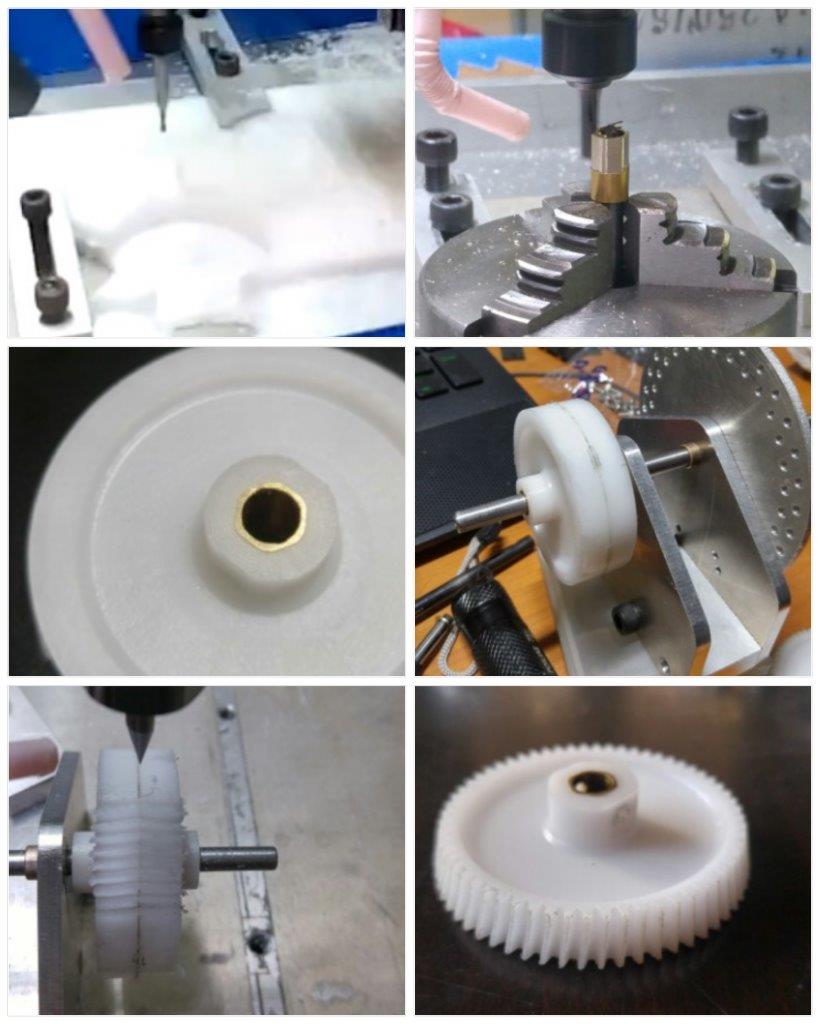
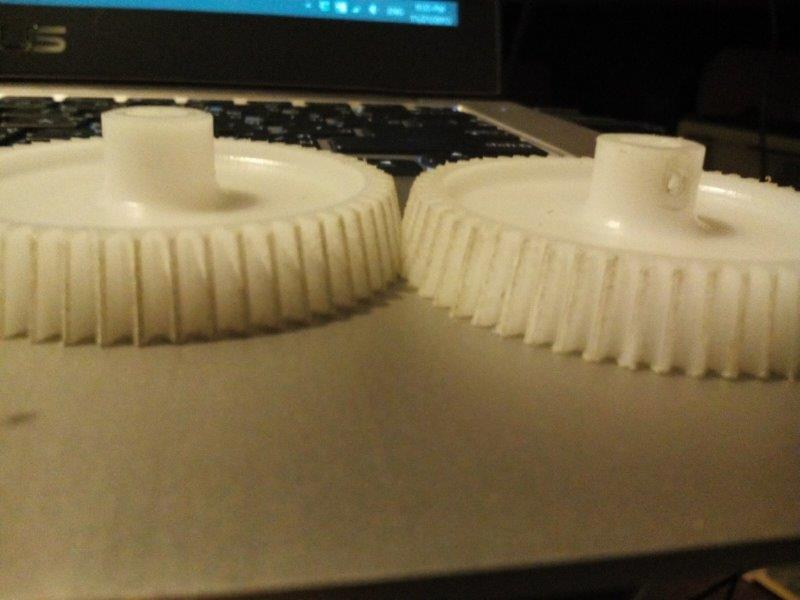
Decided to start with the most difficult part, the custom bevel gears that mesh at 25 degrees.
This pair of gears proved countless people wrong about capability of 3 axis CNC


September 13, 2015
More details in
September 20, 2015
Made a prototype frame from acrylic

September 24, 2015
Bearing blocks




October 12, 2015
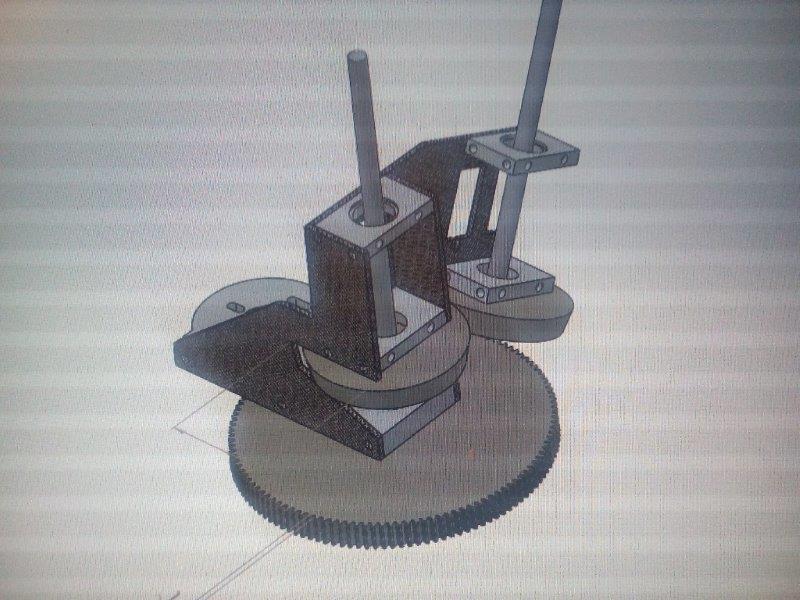
Came up with more practical design
October 18, 2015
Access to “real” CAD software

November 12, 2015

November 24, 2015
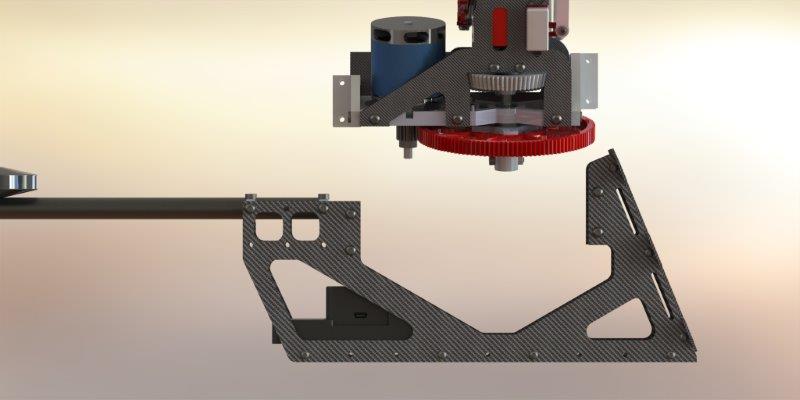
The finalized design

December 21, 2015
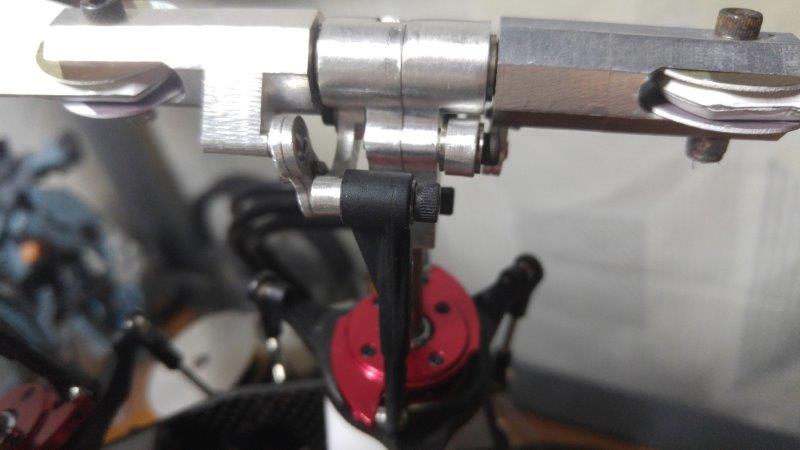
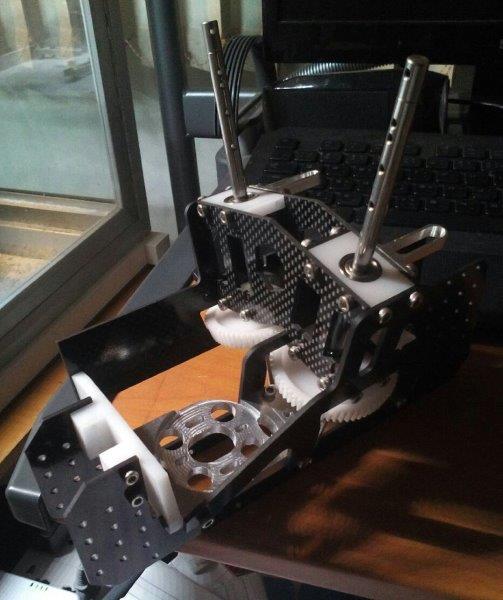
Getting real!
March 8, 2016
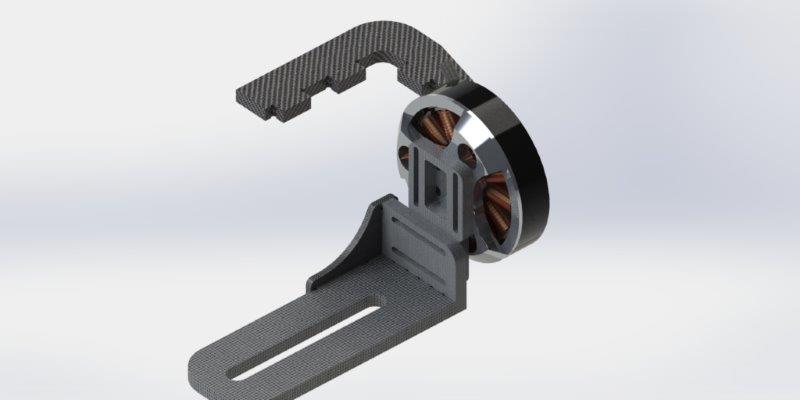
2nd most difficult part: Rotor heads
The blade grips need angled arm to avoid blade strike = custom made
Table top CNC isn’t going to make them like magic
This is Fail compilation, total of 4 failed attempts (3 are human error  )
)

A pair needs to be made on the same Al block to ensure that they are identical and balanced
April 3, 2016
Finally usable grips!

April 5, 2016
Now, the center hub

I consider this the trickiest part to make on 3-axis machine…and they all failed

None of these hubs work,
Loose on shaft,
shaft won’t fit,
spindle not perpendicular.
no matter what tools I used to flip the work piece, there are coordinate errors
It’s impossible to make without 4th axis

Until
August 22, 2016
“If you can’t flip it, mill both sides at the same time!”

//Run out of photo uploading space
continuing next reply