Hi all,
Our company (SeLab) is planning to manufacture tiny optical flow + tof for ardupilot and px4 . (We developed it first for our drone but now we want to sell the product).Now we need to listen your opinion to make the product more suitable for you
The product will work immediately as PX4 flow which means you don’'t need to modify firmware
We have developed 2 type of sensor : 3m and 12m
Version 3m: (Application as indoor drone and tiny drone) Product specification:
Board size 25mm x 15mm:
I2C address: 0x42 (the same as px4flow)
Pin out J1: 6 Pin : GND -SDA-SCL-5V-GPIO1-3.3V
The GPIO1 is working as TX wire to output the height data only (work similar like lightware serial) . The purpose of this pin is to make it easy to use for ardupilot firmware (which don’t get the height data form px4flow)
The flow rate will compensate with the gyro data . We will calibrate before shipping and offer tool for who want to recalibrate.
Version 12m (based on lidar of tfmini from Benewake) -
Board size 34mm x 15mm:
The product are includes the TFMINI from benewake and our circuit ). Its pinout and function works similar the version 4m.
We would like to aks for your opinion: Is this product is small and fullfill all your requirements? Do you want any change on our product (size , function , pin orders). Do you want a tiny version with the optical flow only (10 mm x 15mm). Any opinion from you are all welcome? we will try our best to fullfill all your requirement.
Really interesting, there is a need for this in the indoor labs using micro uav. I think that if you can offer the same functionality at a competitive price (compared to Px4flow) this is a good alternative.
Questions:
What is the opticalflow method on the sensor?
We use KLT on Ardupilot
Does it comes with an embedded IMU as the PX4FLOW?
I see a pinhole lens, do you have the effective range of operation?
Is the 3m unit comes with a VL53L1x ?
@ppoirier
1)The optical flow sensor use feature to detect the displacement (flowrate) ,not KLT method. The advantages of this optical flow is can detect the white floor (less feature ) . You don’t need to have a grey floor for hover test.
2)It comes with embedded IMU as the px4flow.
3) The range for the optical flow sensor is >0.1m , you don’t need to focus the lens
4) the 3m version TOF sensor is the VL53L1X
The price of the product is (just estimate - based on user feedback)
Version 1: (not TOF sensor) gyro only is about 50 $. Size 15x10 mm ,
Version 2: 3m : price is about 45 $ Size 25mmx15mm
Version 3: 12m : 80 usd with tfmini , and 50$ without TF mini .
We think the price is very affordable (compare with PX4Flow ) for price and size
We will release the hover test by our sensor soon . As the initial cost for manufacturing this product quite expensive so SeLab hope will receive more opinion for you- developers to make the product best fit with your need.
@anbello
Yes we use the PMW3901 sensor with far len.
We will release the product on the end of this or next month on tindie first and amazon later.Hope we will get support from you-devs.
the target price seems hight IMO, pixart OP (only 7.5$ for 200u) and VL53 are already supported and there are alternative that are less costly.
Something interesting would be to have a CAN bus as it would all to have plenty on a robot and far from the FCU… where i2c can be limited
About the price , The price is not final but yes we wiill try best to give the product price cheaper . However, we want to make the product as small as possible so we need component on both side ( which increase production cost for assembly). Maybe we will try place the component on one side but the size will bigger.
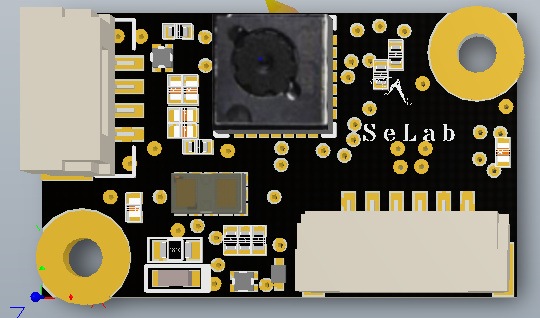
CAN is great. We have a backup 4pin port ( you can see on the picture) . We planned for other purpose but we will see if we can support the CAN on this version
How about the 12 m version? do you guys need this? we thought this version is not essential as you can use the optical flow only version with your range finder. but this version will make the tfmini and optical flow into one block( which reduces the wiring and space).
I’m in Patrick can’t have all the fun lol.
Been wanting to add this to my build for sometime, but size and weight is always a concern as is distance. 3 meter range…nah…I am an outside guy 12 meter…now your talking.
6m outside is really a good height I think. Just not 3 meters.
6m outside is 20 feet thats plenty high enough. I watched your demo of optical flow and lidar…I was jealous and want to do that
@eetwidget
The 3m version is use for tiny drone (where mass and board size is most important thing), or indoor enviroment.
Range of the tof sensor of 3m version is >5cm and <4m
Range of the tof sensor of 12m version is >30cm and <12m
The indoor version have maximum high distance is 4m but reliable below 3m in normal light.Outside test is not reliable (because the strong light) . We tested outdoor- strong light (1pm), it works reliable below 1m
In the future (worked on prototype) , we will have another mode: output the position in X Y Z in meter (1-3% error) (using dual optical flow to compensate error) . This application may be use with other robots (not only drone) to navigate and mapping with require high accuracy.
Hi,
Both version will be available on next month, Currently we have problem with the lens of PMW3901MB, will be fixed soon.
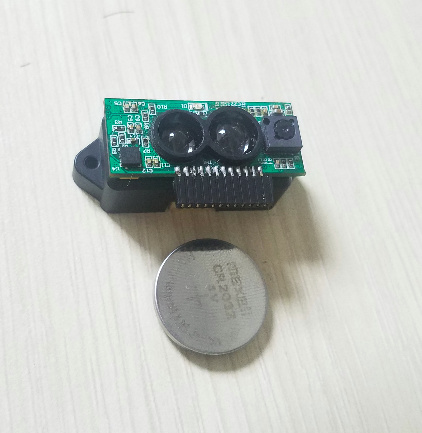
Here is the prootype of th 12m version
And the video of the tiny Flow test (3m version ) , the height of the hover drone is about 2m5, test indoor . We develop drone for 3rd party so sorry for the blur . We are not allowed to public the customer drone
Hi , the IMU is I2C and PMW3901 is SPI. We tried to use SPI for the IMU, but reading IMU by SPI caused the IMU get hot which leads to fault gyro data (could use temperature compensate but not reliable).


 !
!