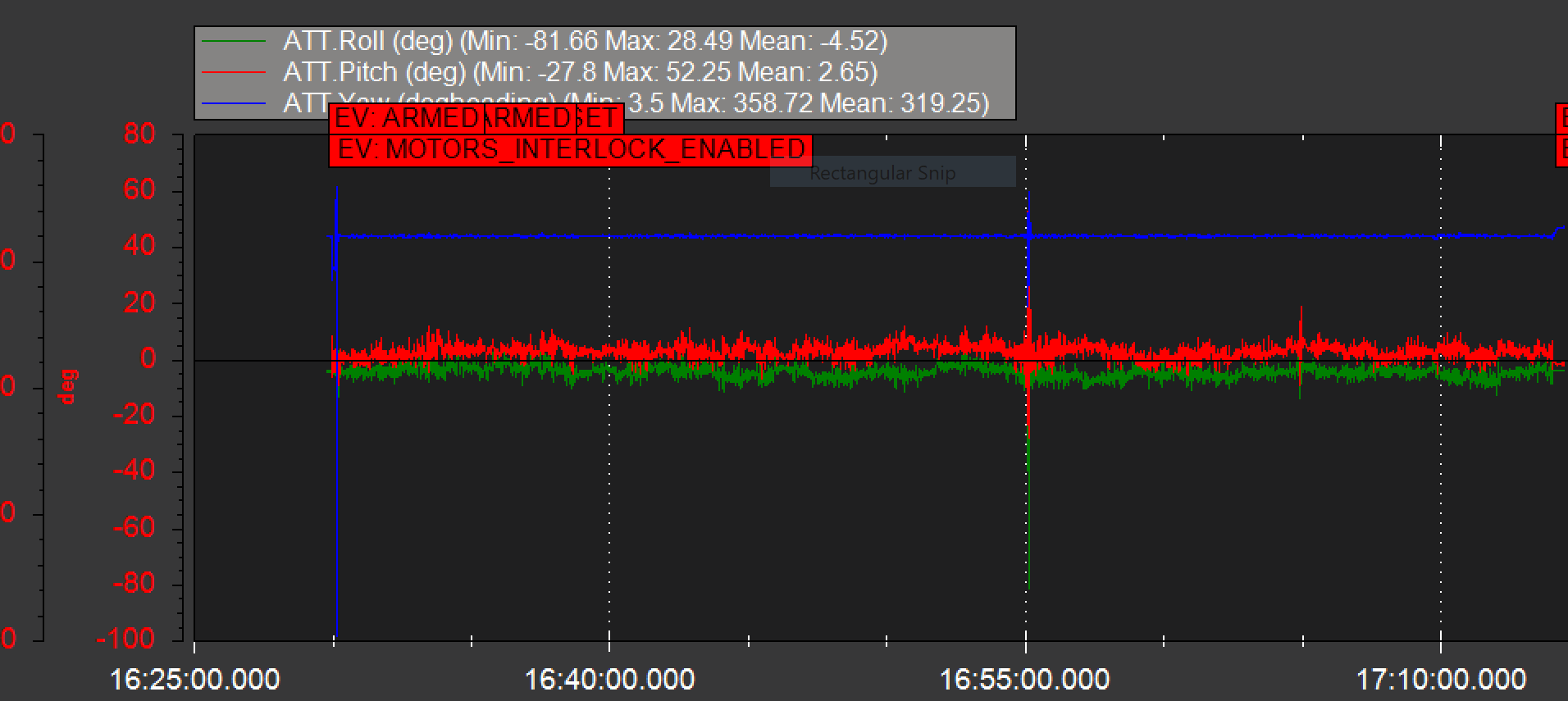
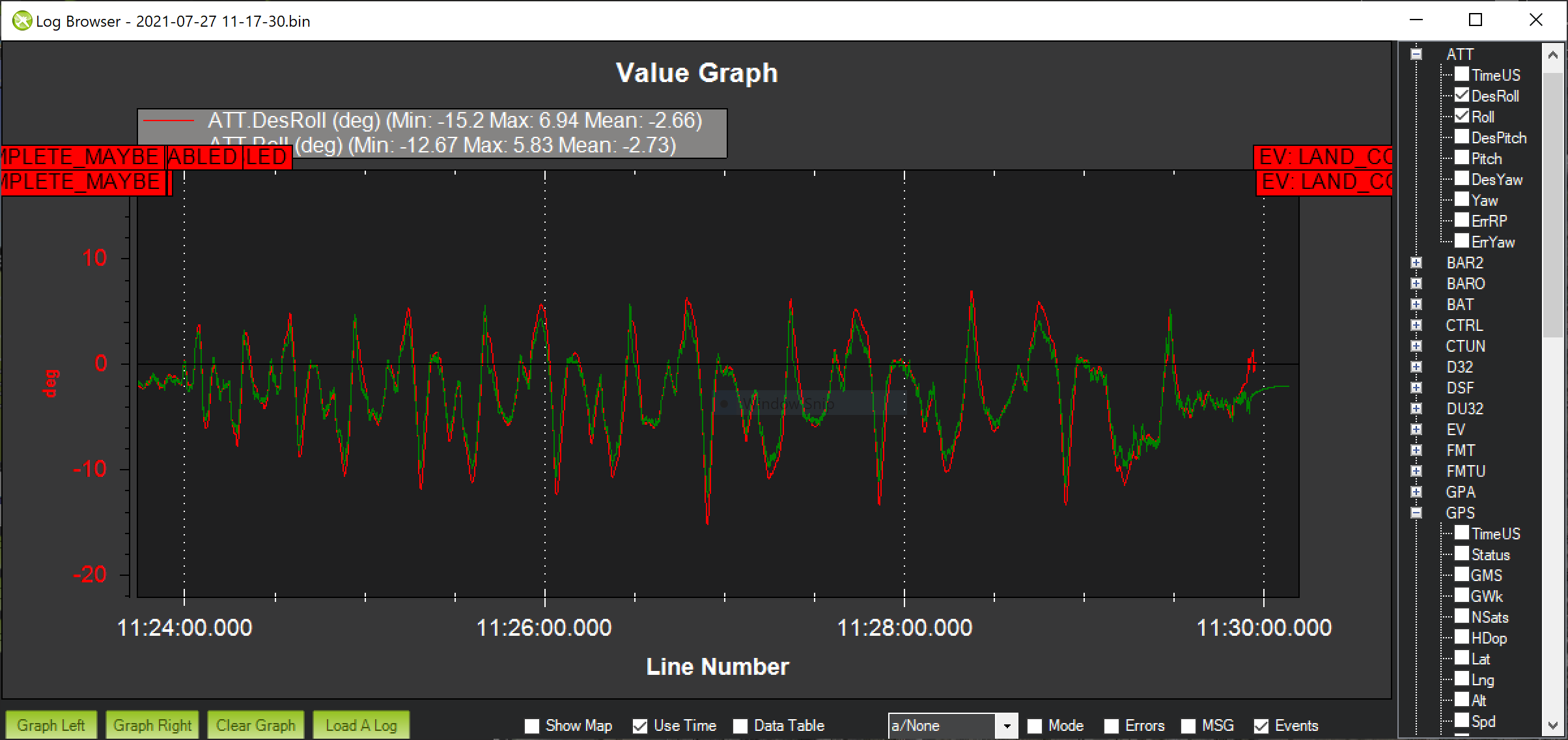
Quad1
It actually does that twice in the flight. The second time is a smaller excursion.
The problem is tuning. The PIDs are too low and there’s a lot more you can do to set this up correctly. It seems somewhat manually tuned.
I see you’ve got the Harmonic Notch filter enabled, do you have a log with the pre-filter data? Or can you do a hover test flight with
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
I’m not saying the HNOTCH is a problem at all, just checking if it’s correct, as part of the process.
INS_HNTCH_ATT can be set to 40
I would set these and see if you can get off the ground without too much oscillation (or any at all) and just hover and maybe some gentle movements if it’s going OK.
INS_GYRO_FILTER,23 (just leave all the other filter settings how you have them)
ATC_ACCEL_P_MAX,50500
ATC_ACCEL_R_MAX,50500
ATC_ACCEL_Y_MAX,18000
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_ANG_YAW_P,4.0
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.00625
ATC_RAT_PIT_P,0.1
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_D,0.00625
If that goes well and normal flight is possible, I would do Autotune on Pitch and Roll. Yaw can be sorted out later.
Let’s see the log of a test hover to collect the HNOTCH data and with those updated params - and include your thoughts and observations.
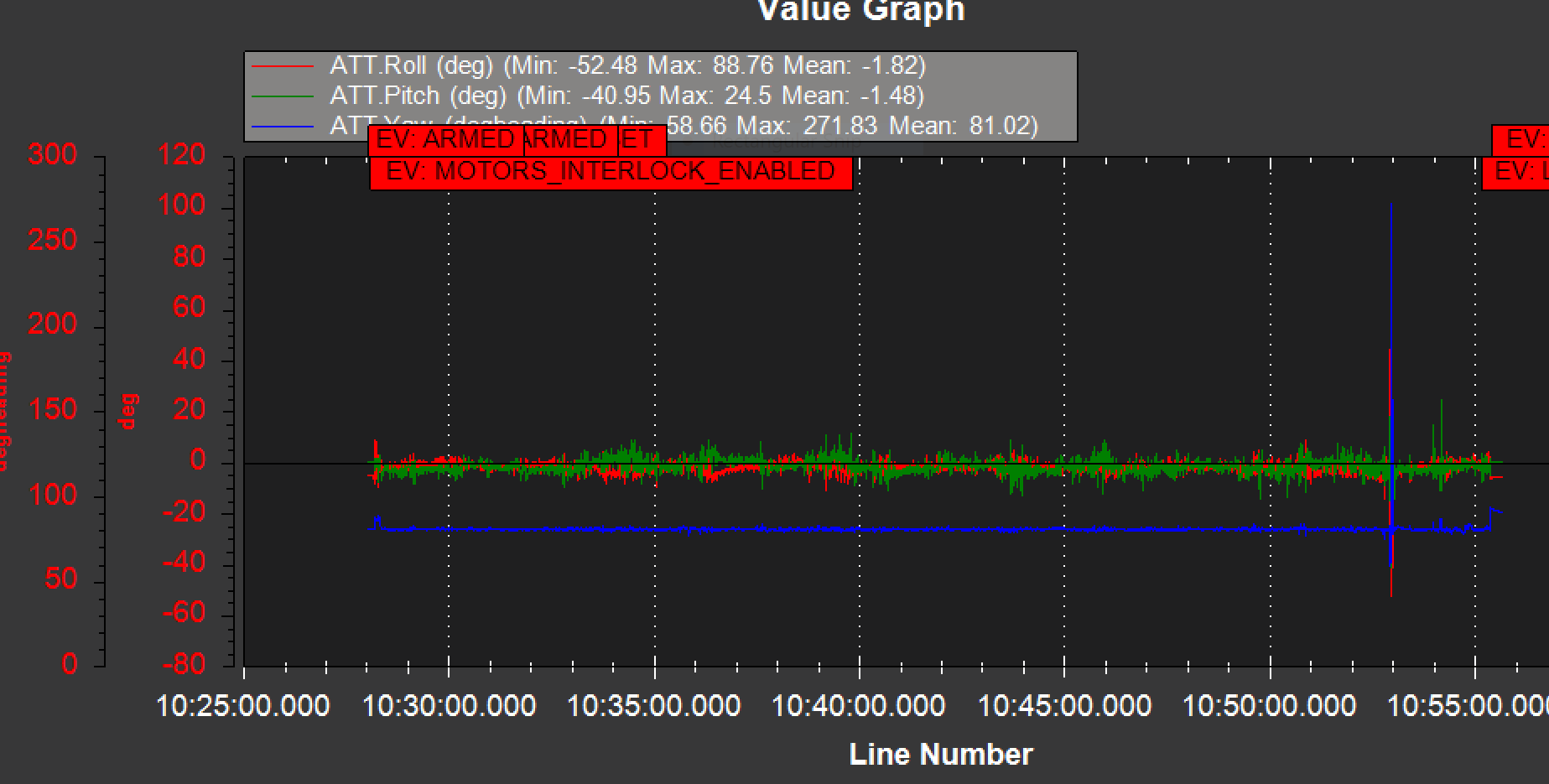
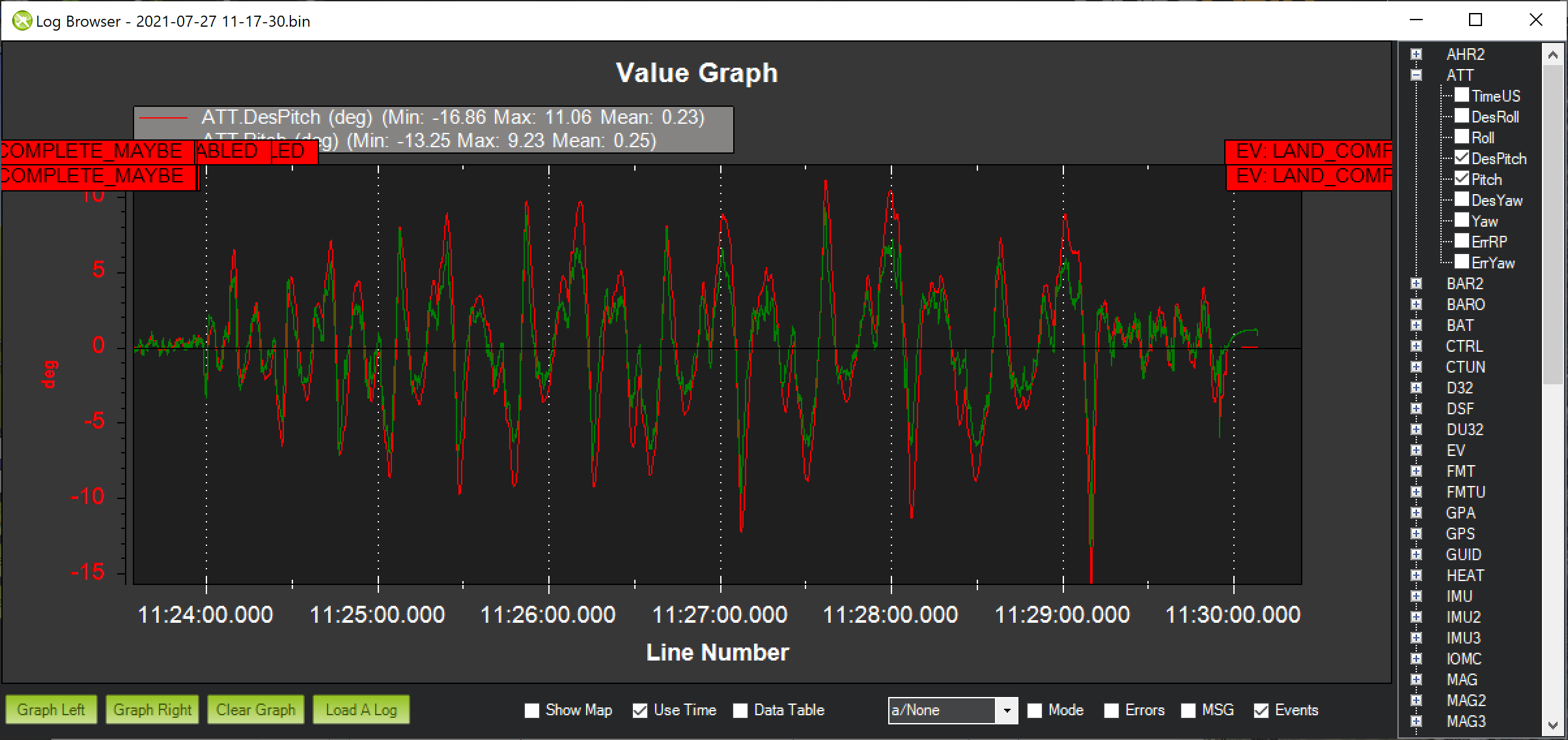
Quad2
Same again, there’s always oscillations in pitch and roll that the flight controller is not able to correct with the current tuning. Eventually it gets out of control.
This graph is not even showing the excursions, just mid-flight.
Same parameters as above, but HNOTCH is a little different. I would definitely check and tune HNOTCH for each individual aircraft, but the other ATC params can be used on both as a starting point. In the end you might be able to settle on a standard set of tuning params that works well on both aircraft. I would just test and tune on one aircraft and see how that goes, then MAYBE transfer some of the settings over and retest on the 2nd aircraft.
Ideally you’d autotune individually in case there’s slight differences you haven’t noticed.