Yes, 4g works great 3m+ when aircraft is off the ground, does drop in and out when it’s sitting on the ground which is annoying, camera isn’t high quality but very easy setup and great to use. Also make sure you have best 4g carrier for the area, I also have RFD 900running at same time.
I’ve finished it now. I ended up moving the front vtol motors forward 100mm, this allowed for bigger forward flight props with clearance (up to 12”) still a fraction tail heavy.
Will be flying tommorow!
Oh and I printed a lipo tray as I didn’t like the mfe setup.



Thanks for the 4G information. Good luck on your test flight!
It doesn’t look like you are using a stock MFE folding VTOL arms. It probably doesn’t fit back in the box.
Cheers!
Nope, too much twist during yaw for what I wanted, I also don’t like failure points, replaced with 25mm CF square booms, square makes motor alignment easy.
I fits in my car boot who needs to transport it you can just fly it to the GPS destination 
Hello guys, i’ve searched around the forum but never find an answer for my question.
How can I determine the max payload weight of my quad plane?
We have a lot of parameters and I dont know what parameter can increase directly the payload weight.
I think setup of VTOL is the head of payload weight, if the “copter” can lift the payload maybe the “plane” can fly with, but we have wing span too.
But if the forward motor dont have enough power, it can’t fly with the additional payload.
Where I want to get with this question: I need to build a quad plane that can fly at least with 4kg of payload, but I really appreciate if the plane was small and don’t use a 12S setup, its more convenient for my job.
So, if I change the “copter” setup (stronger motor and bigger propellers), can i increase the payload weight of this Striver mini Vtol?
I think for that payload you are better to look at the mfe fighter.
However you can always add coaxial motors for extra lift and a bigger forward motor, you also may need to reinforce the body as 4kg is a fair payload
Hi Giovane,
To carry a 4kg (8.8lb) payload, you’ll need a large strong vehicle. Perhaps a heavy lift drone will suit your needs. Here are a few examples.
FoxtechFPV Great Shark 330 VTOL The suggested max payload is 4kg.
FoxtechFPV Heavy Lift Drones
Mugin UAV
Cheers!
Crashed my striver pretty hard, pilot error, didn’t have it tuned hard enough and auto mission clipped a hill it was meant to turn before,
Rebuilt it and did a gender reveal with it today. Hence all the tape ![]()
Congratulations on both! I have 5 grandkids so I know the joy.
At first, I thought there was trouble with smoke coming out of your Striver and then I noticed it was blue.
Cheers!
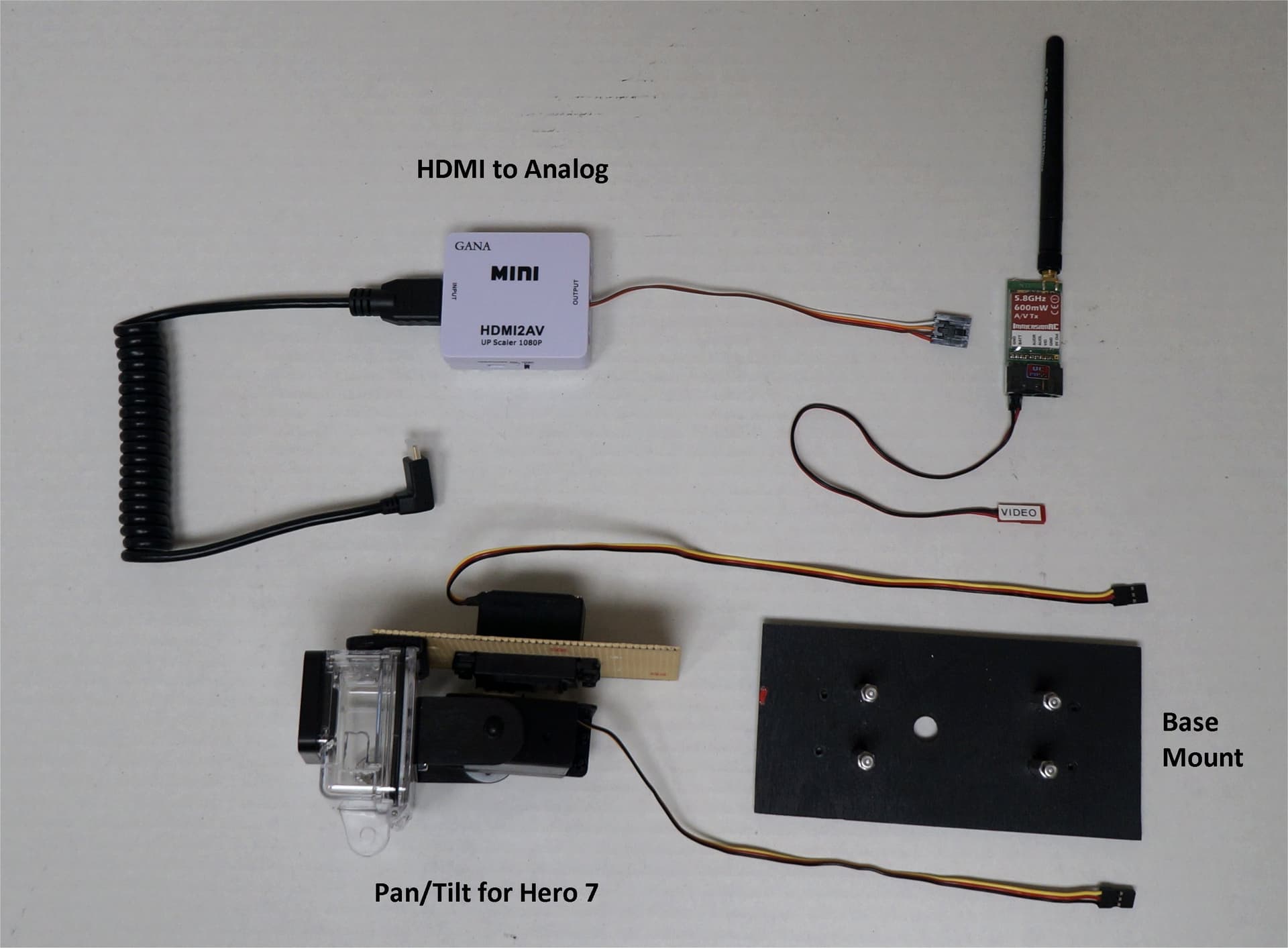
I started working on my pan/tilt mechanism for the Striver. This is kind of reverse order from my Fighter build but I knew that I wanted a slightly smaller mechanism and liked the way it worked on the larger Fighter. I also didn’t want to swap pan/tilts between planes…only the camera.
I discovered these Lynxmotion Pan and Tilt Kits so I bought both sizes without servos since I have many already. They cost only around $10 each.
I created a Vector board mount which attaches to my standard plane and drone mounts derived from the old Feiyu-Tech G3 Ultra gimbal. This allowed me to test the mechanism on my Tarot 680 Pro hexacopter and I was very happy with the result. The GANA Mini HDMI2AV converters have produced a quality analog output for my GoPro Hero 7 Black camera so I can use my existing 5.8GHz video systems.
Anyway, it was a good start to get excited about building my MFE Striver this winter.


Very impressive setup, so I assume you will just use a rc switch to adjust min and max servo positions?
Is digital an option? you could even try the 4g setup and put the xblink camera on the gimble (I just dislike analog)
Yes, that’s correct. One for tilt/pitch and one for yaw. I have lots of analog video gear from over the years so I reuse it to keep the cost and complexity down.
The new ESC arrived last night! It worked perfectly (thanks MFE). Only had to switch wires to reverse the motor direction.
Ready for maiden 

1 Like
Wow, you built that up quick! Good luck on your maiden flight!
Delayed maiden - failed pre-flight checks …
Did the final flight check at field and when I pull back, the elevator goes up - good.
When I point the nose down in QStab the elevator goes up - good.
Mission planner shows the plane orientations properly.
But … when powered up, the node dips and back elevator moves it forward, forward stick it goes backward. Opposite of what I’m used to so starting the arduous step by step to see what I missed. Oh well …
Edit: ran the Mission Planner Motor Test and found motors 2 & 3 where swapped at the FC. Never did that before but probably happened when troubleshooting the ESCs so much. That’s why we do preflights, right? Hopefully the winds are light tomorrow …
Yes.
Very stable w/the MFE parameters. Pulled about 35A in hover.
Didn’t transition as I left the hatch covers at home (getting old sucks) …
Time to start adding the payload.
Is this power distribution board part of the PNP package? In Ali Express it says optional.
I didn’t get one with mine. I used a terminal strip (just used a single terminal as a screw junction since the strip can’t handle the amps) to join the wires.
Good maiden !
Light wind, sunny day, cool temp - no excuses.
Telemetry quit recording after arming. Only 2 glitches: when I transitioned from FBWA to Auto, the switch went thru the QStab position momentarily but the plane reacted to it (should go away if I add a bit of delay in the TX before actuating a mode), and, the Fwd prop was vertical when landing so it hit the ground before landing. I may see if I have an unused channel that I can activate to blip the prop level before TD.
Flew GREAT! Transition was just like MFE’s videos, no altitude loss and simply sped up and off. Amp draw hit close to 90 at the start of transition then settled down to about 10A with a 40 mph cruise. Hover amp draw is around 40A. Very stable using MFE’s settings w/an orange Cube. Didn’t try (and probably won’t) manual mode, just QStab, QLoit, Auto, FBWA, and RTL (w/the QRTL transition).
Short 6 min flight and had 4.09V resting voltage after landing w/ two 6s, 8000s in the center of the battery tray.
Last item: add the payload …
I may have missed this, but what Arduplane firmware version did Makeflyeasy or you use for the Striver?
Arduplane 4.09 ( 4.1 wasn’t a stable release yet as it is now) and MFEs mini Striver param file.