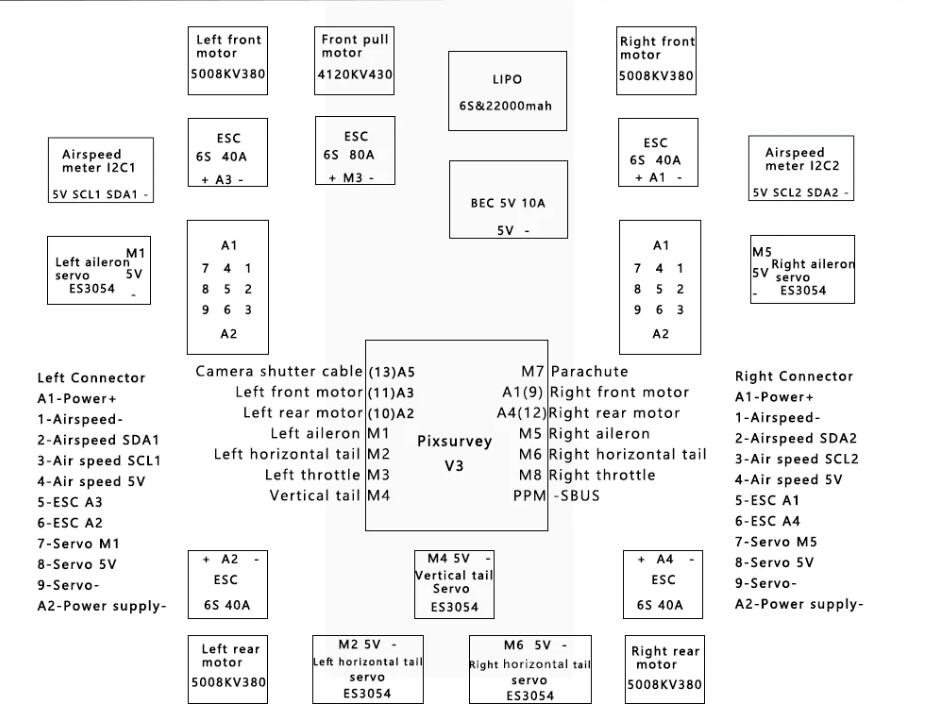
The parameter defaults to the X structure, and the following is the referenced wiring diagram.
1 Like
Striver_VTOL.param (4.7 KB)
Parameter file uploaded
And what should be the ardupilot version for these prams ??
Should mini striver have one airspeed sensor or two ?
In text mode, open the parameter, which is described in the first line.
The airspeed depends on your own configuration, 1 or 2 is fine.
So today was maiden flight of mini striver
Jsut did qstab then qhover and qloit with default prams given by MfE , we tried to do qautotune but pilot override error was coming even though there was no input from our side to the radio
Any one who has faced similar issue in qautotune
Hi
Can any one join this discussion and help and advise me regarding this
Dear,
Thanks a lot for this guide and for making your vtol model available for discussion here.
I am new on drone assembly at all but I am very interested on acquiring affordable unit for mapping.
(I have some experience on processing uav data but not on uav building!).
I found the Striver mini on internet and I am very interested. However, there is no mention about the compatible Camera. Would you, or someone in the discussion group, please tell me what camera models should I use?
Also, I wanted to ask if it is available for purchase somewhere with all of the necessary parts (kit + electronics + gps + battery so on)?
Thanks in advance.
AJA
I don’t have a Striver so I can no guarantee that it fits but I use the Fighter for mapping missions and I use a Sony A6000 for that with a 16 or 20 mm pencake lens. It works great and you can use a hot shoe cable for trigger feedback to the flight controller. With that you are able to post-process the images and geotag them.
If you want to do very precise mapping, you can use a Reach M2 unit and connect it via hotshoe to your camera. I use PPK for that. So no realtime-telemetry is needed. But you could also feed NTRIP data to it and establish a RTK connection.
All MFE products are very solid and have a great built quality.
You can buy it from UAVmodel for example.
Greetings
Thanks a lot for your response. Your response gives me more interestet on the MFE products then, I am willing to use either PPK or RTK too. The Reach M2 seems very good (I have never used it but I have already used RS2+ products for GPS field campaign). I am checking the models available on UAVmodel.
But, Is there a possibility to buy a “nearly pre-assembled” model with almost the Power system, the commands and motors already configured in UAVmodel or somewere else. I understand that mounting the camera is another work which will necessarily lead me to find tutorials somewhere then!.
And I see also in the discussion a lot about the Cheapest shipping but last posts are nearly two years old.
Actually, do you have some advices on where it is better to buy, please?
Greetings,
I did not find a cheaper source, yet. I actually bought my second Fighter yesterday at uavmodel so I have no idea where to get cheaper shipping.
When I bought the first one before COVID, I think shipping was around $25 or so ![]()
Ok, 25$ thats really good. And how about the nearly “pre-assembled” model? Do I need to really do a lot of electronics as It seems from this post! If yes, I will try to get help from my friends or colleagues additionnally to all the helps that I can get from this posts members like you.
But for you Figher model for instance, did it already come with all the necessary components to make it fly?
I have an additionnal question following your previous response : I assume that if I use for instance the A600 camera, I will only be able to use fixed shooting angle (probably nadir)?
We have complementary aircraft assembly services to offer.
Thanke you for you return. How much does the aircraft assembly cost and when the aircraft is out of the box, what remaining things do I need to assemble my self? Can you please recommend me a list of compatible cameras please?
Support Sony A6000,A7R series camera
Hi
So we assembled mininstriver and used prams provided by the company. There after we did notch filter settings and qautotune in quad and autotune in fixed wing flight.
We did a small auto mission flight. Can someone with experience have a look at our log and advise if we are on the right track ?
Log - vtol - Google Drive
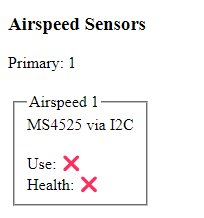
after a quick look on the hardware report tool, it seems that your airspeed sensor is disabled.
Other than that I would do a figure 8 flight with constant altitude decrease the Q_WP_RADIUS to 100.
But I would like to know what others think about.
Yes I had realised that and changed it.
Could someone have a look at our log out Mini striver crashed today after rtl and once we took on qloiter. Motor number 3 stoped working and plane fell like a stone . Any analysis would really help me
Regards
@amilcarlucas vould you have a look at this log and analyse it why vtol motor 3 stoped ?
Thanks
When a motor stops is usually because an ESC or a Motor failed.
Test Motor3 and ESC3.