RC6 is the one that saturates, So I guess ESC4 is the one to blame.
I am trying to simulate Striver mini VTOL model in Gazebo and SITL from Ardupilot. I could find the parameter of Striver mini VTOL. So, I could simulate Striver mini VTOL in SITL without Gazebo simulation. But I couldn’t find model.sdf and model.config for Gazebo. I would like to ask you to help me to find them. If there is no such model for Gazebo, I would like to ask you to help me to make one. Thank you.
Hello @Byeong_Yeon_Kim, unfortunately we do not have a Gazebo model for this aircraft. If the 3D CAD model for the vehicle and specifications are available then it is possible to create the model, but this is quite a large amount of work. You are welcome to look at some of the other examples in SITL_Models and use those as templates. Aside from rigging the model, the main work will be to estimate the aerodynamics parameters for the physics and then tune the aircraft AP params.
Thank you for your answer. It would be big help for me. I tried to find other similar examples with Striver Mini, which has 4 rotors for quad and 1 throttle and 3 control surfaces (aileron, elevator, and rudder each not elevon), but I couldn’t find one having all those features in SITL_Models. Could you recommend any other examples which have those features?
Hi everyone,
I recently got a Striver Mini +1 PNP and have added the following components:
- HereLink (for control and video)
- Emlid GNSS (for RTK positioning)
- Cube Orange (autopilot)
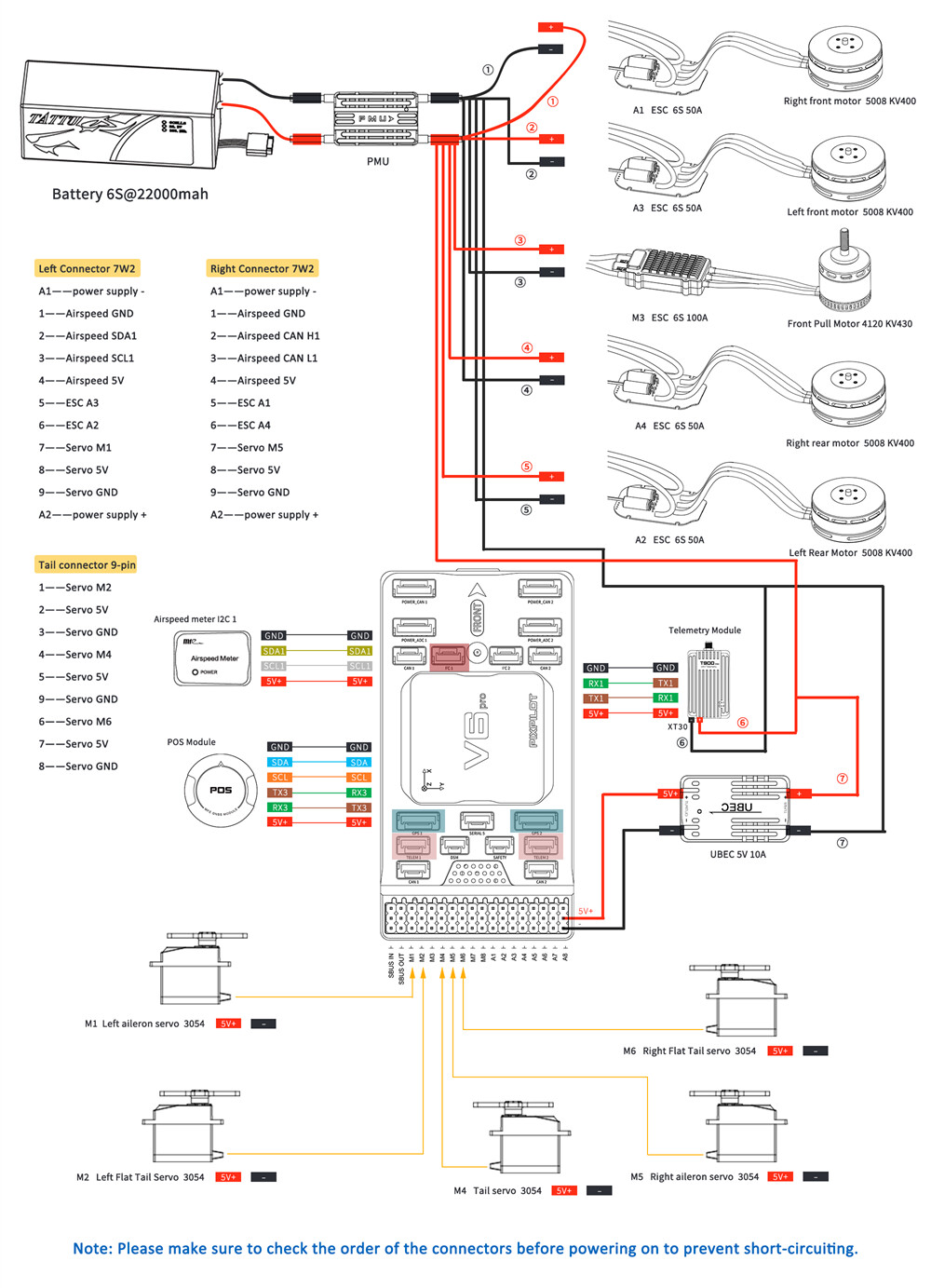
I still need to select the batteries, and I’d appreciate any advice on the best wiring setup to properly integrate these components.
Specific questions:
- Does anyone have a wiring diagram for this configuration?
- What battery setup would you recommend for good efficiency and endurance?
- Would a Mauch Power Module be a good choice for this setup? If so, which model do you recommend?
Any suggestions or references would be greatly appreciated. You can also reach me at gerencia@migeodb.com.
Thanks in advance! ![]()