I have a particular configuration: copter 4" 21700 li ion arducopter 4.3.5 RC1 (kakute F4 CFW 1 MB), TFluna lidar as altimeter and sonar GY-US042v2 as obstacle avoidance (bendyruler active). The copter works well and the lidar and sonar do their job when the copter is in loiter. The problem becomes clear when I try a simple mission with 2 waypoints (taken in the field with AUX function). The copter seems to be heading correctly towards the first WP but suddenly it gains altitude and seems to rotate by yaw as if it was looking for something. It happens even if I disable the sonar for obstacle avoidance.To stop this strange behavior I have to use the loiter and regain control of the copter.
With version 4.4 and benyruler active, I got the expected behavior: the copter flew in auto mode between 2 wp, in case of obstacle along the way, the copter jumped obstacle and resumed the route towards the second wp. I don’t know if this behavior derives from the firmware change or from some incorrect setting. I add a log of a flight with 4.3.5 RC1 where I encountered the problem. Thanks for any suggestions!
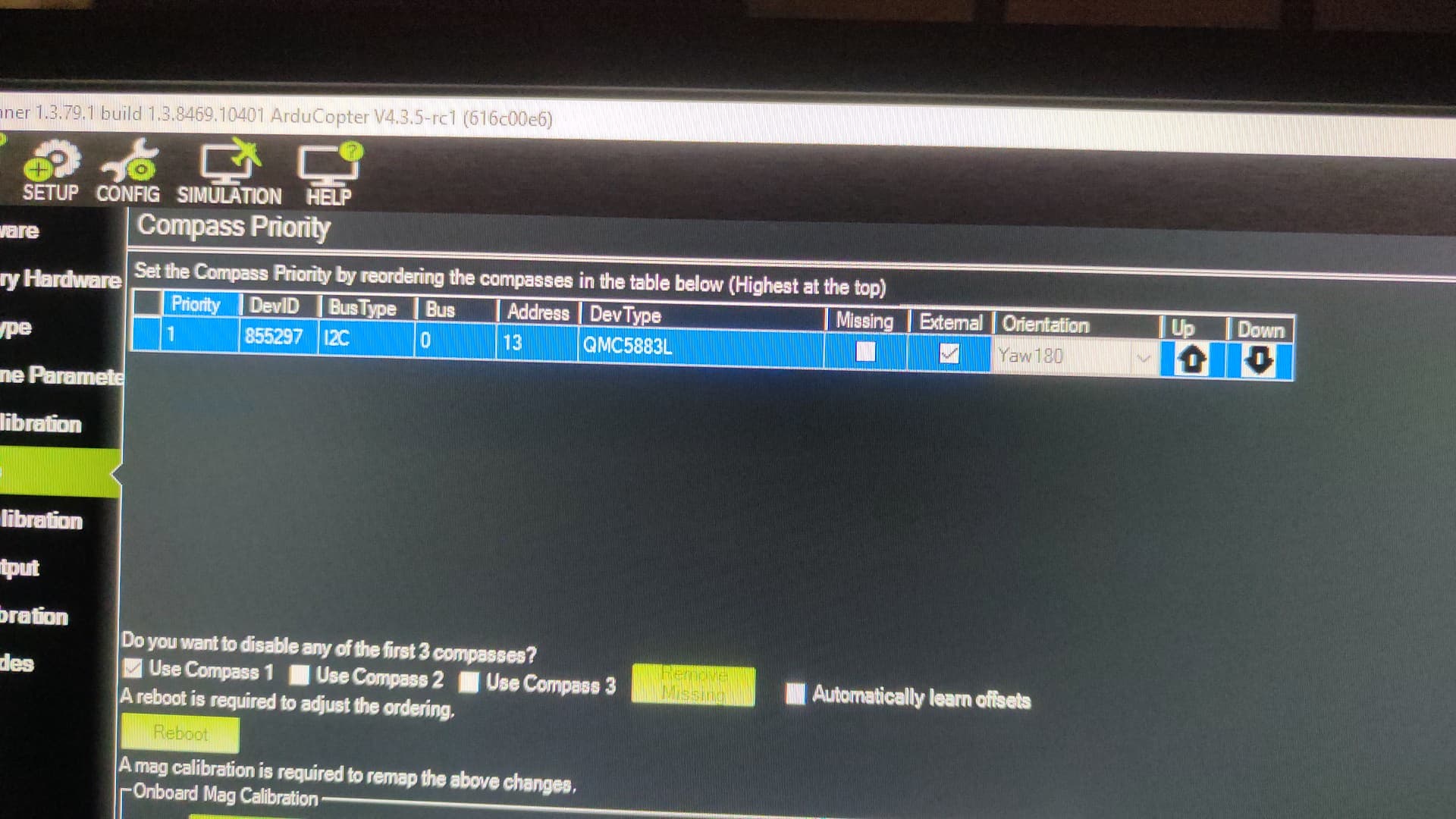
Could it be a compass problem? I changed the GPS position from the stylus with orientation none to yaw180 as the GPS was placed on a 3d printed support.Placed in the rear of the copter. Of course I repeated the compass calibration and the orientation was corrected to yaw180. In loiter mode it works perfectly.
This is a log made today. I had set a waypoint at 8m altitude and when I activated the mission in auto mode the copter climbed by itself to 38m. I had to stop with loiter mode
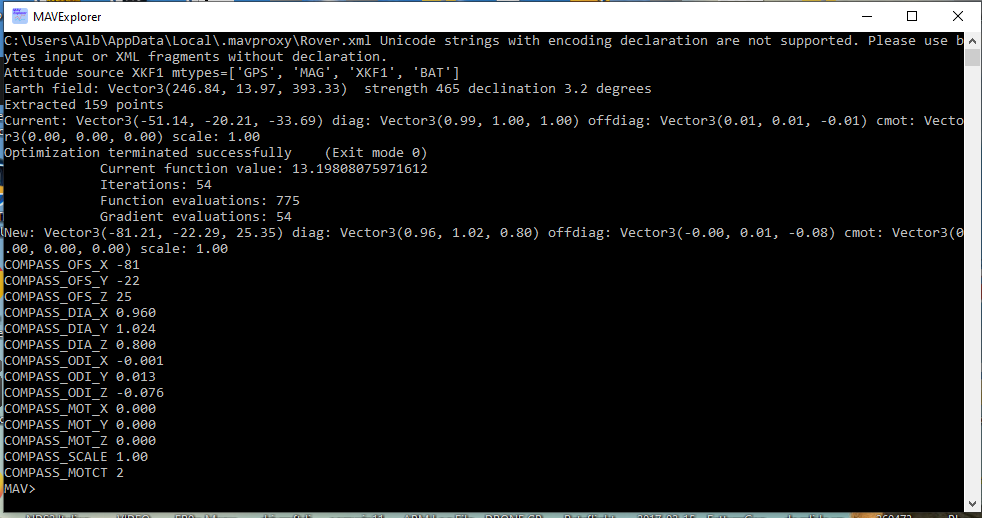
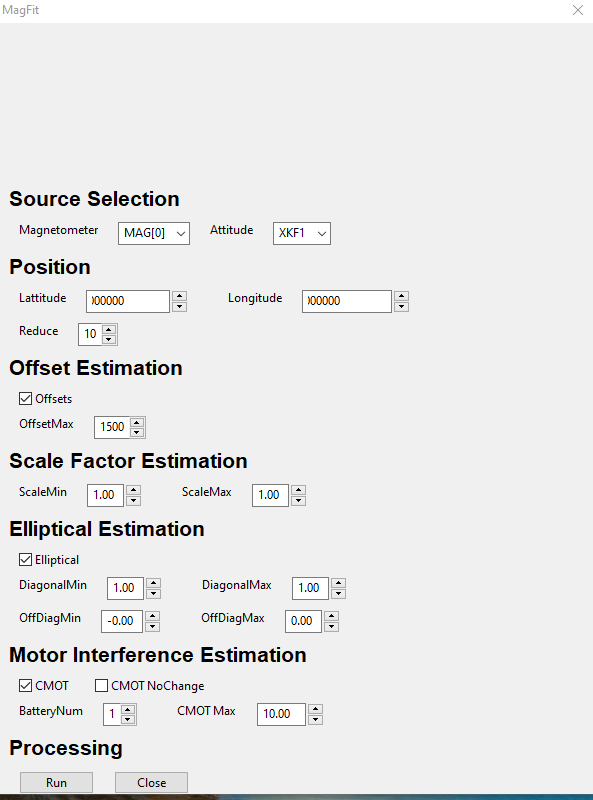
I will also try with these values extracted with magfit
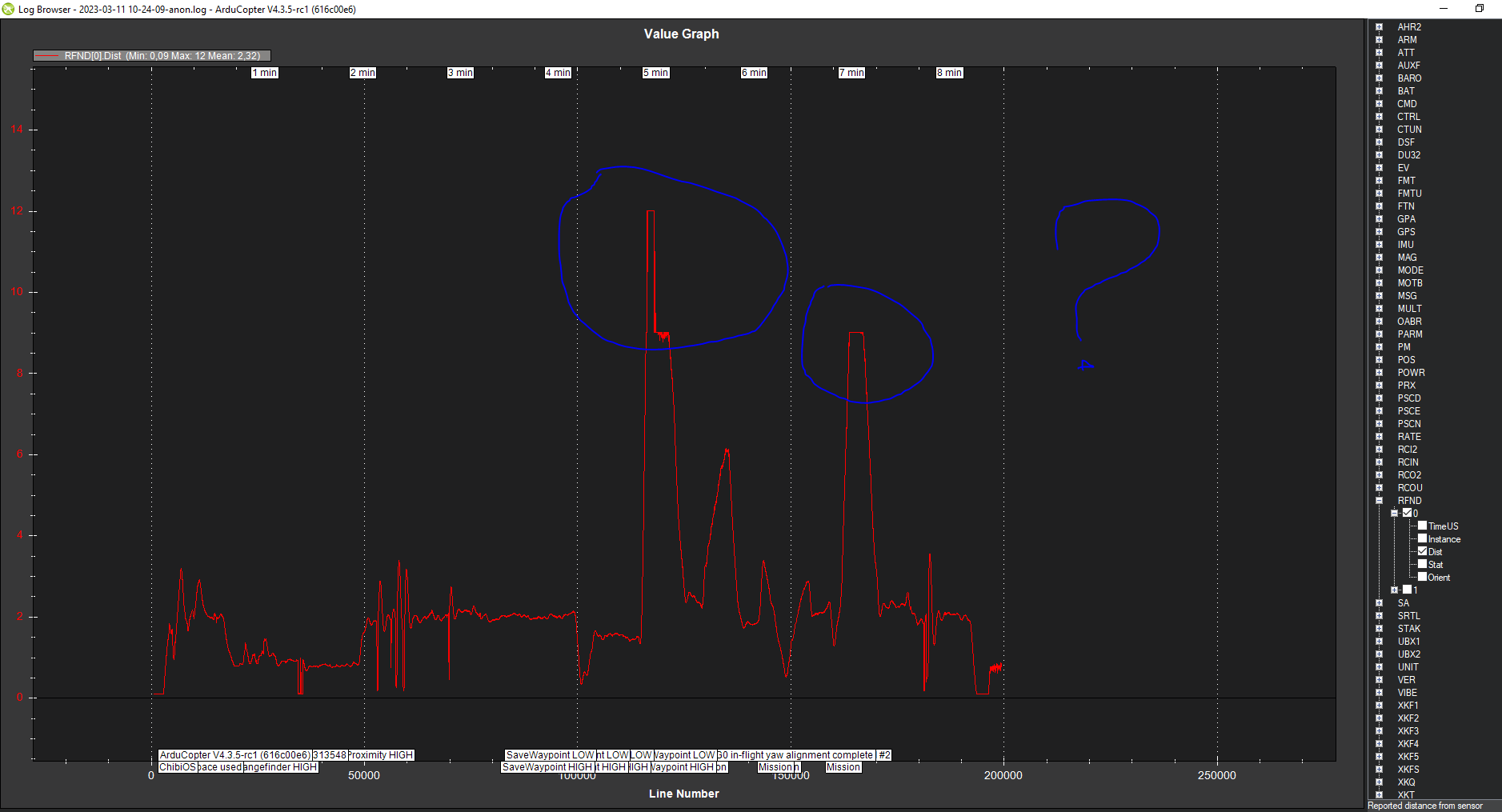
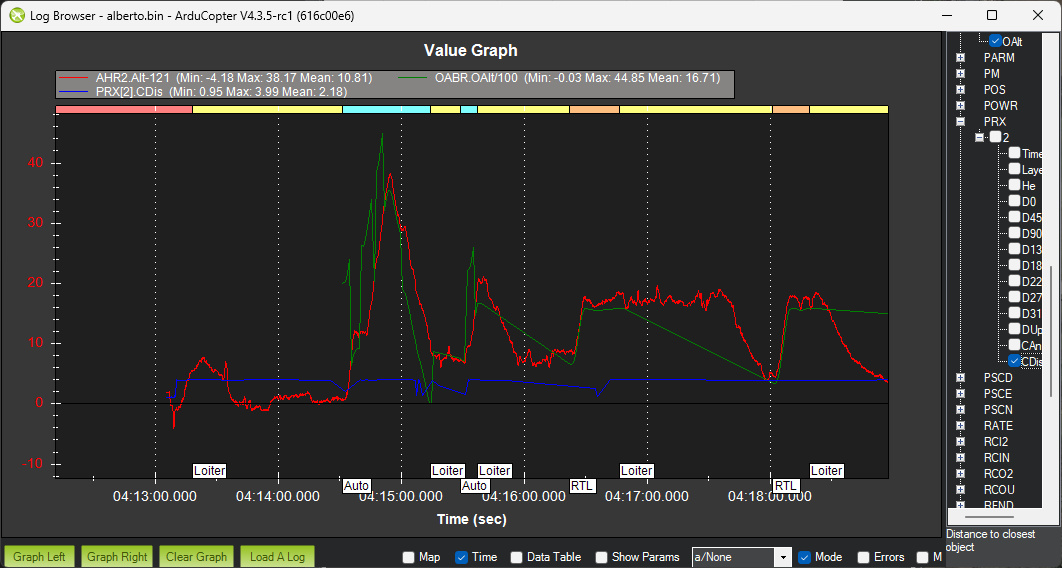
It’s definitely an obstacle avoidance problem. You can see here that actual altitude (scaled to be relative) and OA commanded altitude (scaled to m) are nearly coincident.
I wonder, though, if there’s a potential scaling error in the obstacle avoidance altitude, since it appears to be a factor of 10 over what’s required for avoidance (nearest obstacle shown in blue, and the OA config will result in a 4m reading when no obstacles are present). @rishabsingh3003 - is that a possibility?
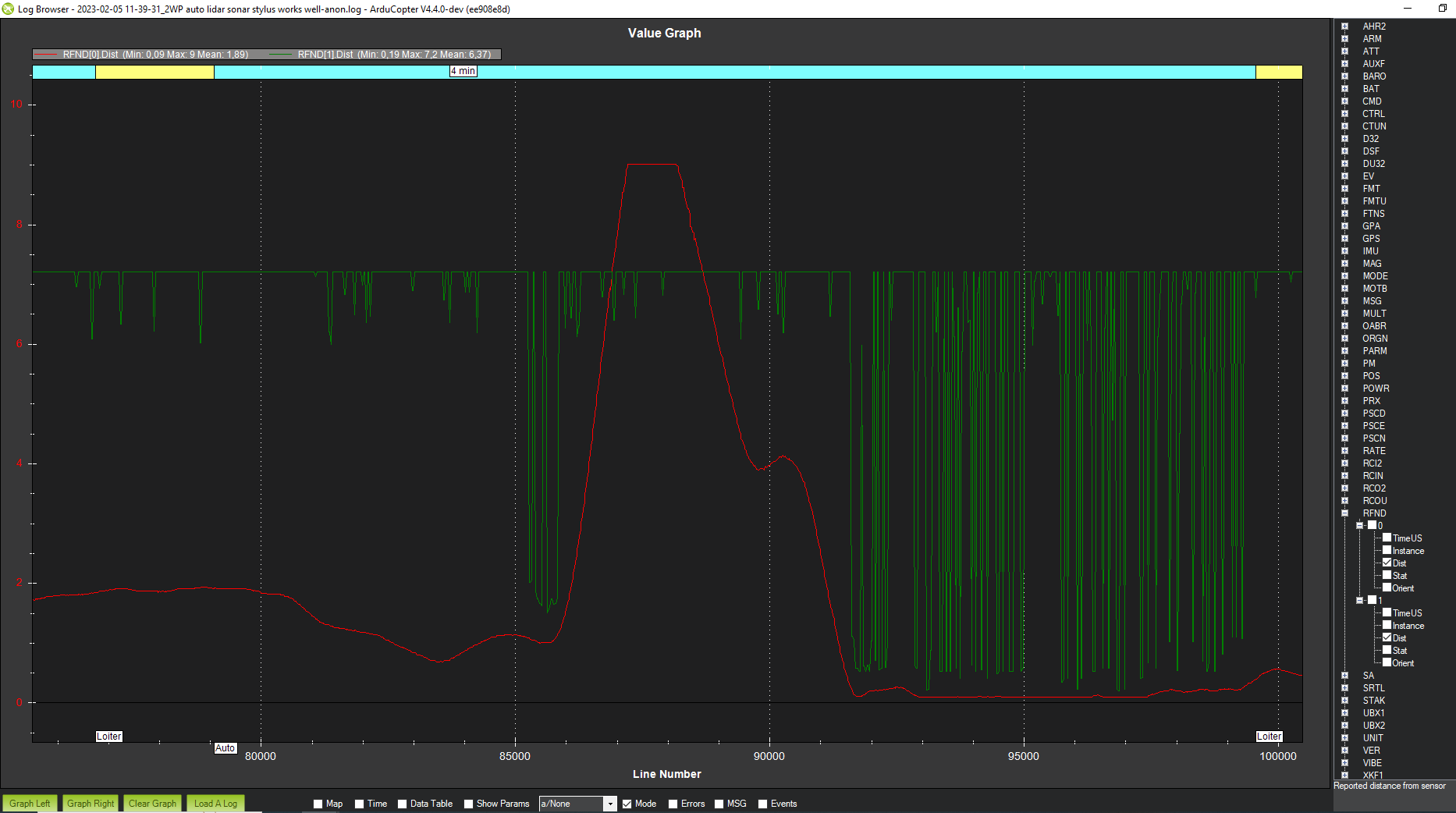
I found the log where the auto mode mission worked fine. In particular, below you can see the sonar that intercepts an obstacle (I sacrificed myself for science! ), which is correctly skipped thanks to the lidar as an altimeter, and then resumes the route towards the WP.
I had GPS on the stylus (compass yaw 0) and arducopter 4.4 dev CFW (kakute F4 1Mb).
I don’t understand why with GPS on the back (compass yaw 180) of the copter and arducopter 4.3.5 RC1 it doesn’t work
However I have now updated the FW from the planner. So I upgraded from CFW 4.3.5 RC1 to 4.3.5 STABLE. I don’t think it changes anything, but it’s an attempt
So far I’ve seen that it does not work with 4.3.5 (OA chooses a very high avoidance value) where it does work with 4.4, where OA chooses an appropriate avoidance altitude.
I see nothing to indicate that changing the orientation or location of the compass/GPS module would have an impact.
Another question I ask myself is why if auxiliary function make me exclude sonar and lidar (in fact the sensors don’t make the copter react in loiter if excluded from aux) anyway the mission in auto mode doesn’t work?
I just had a flight where I did NOT have the Auto mission altitude gain issue.
I changed only two things:
A) downolad of the stable fw from the mission planner that overwrote the RC1 keeping the features chosen with the custom firmware (I don’t think it’s that).
B) I set AVOID_BEHAVE, 0 (slide) instead of 1 (stop) as it was before. I did a mission with two WPs and physically got in the way. The copter actually seems to go around the obstacle (slide) but it no longer has the height jump it should have with bendy ruler in auto mode. More and more difficult to understand!
Below is the flight log, thanks for any suggestion
EDIT: flashing the FW from the mission planner it seems that the PRX part has not been inserted in the FW. I recompiled a stable 3.4.5 from the CFW server including the prox part. I will do further tests
Recompiled firmware with CFW server, added PRX library, doesn’t work.
In auto mode it has random behaviors: climbs high, lands suddenly, climbs high and rotates yaw.
In loiter mode the lidar and sonar sensors work instead (even if the SLIDE looks like the SIMPLE STOP)