Guys, i am new to the forum, but have been following them for a while. I’ve been working with copters for around 3 years now and have some basic knowledge over its working.
My present build is a Hexacopter, with specs:
Frame: Tarrot 680 Pro
Motors: EMAX MT3506 - 650Kv
ESC: Hobbywing X-Rotor 40A
Controller: PixHawk Cube
GPS: Here+
Rc Reciever: X8R
Rc Transmitter: Taranis X9D plus
Gimball: Tarrot 2axis GoPro Gimball
Lipo: TATTU 6200mAh 4s 35c.
Story:
She was designed for Aerial Mapping, and was flying perfect. It was not her maiden flight that day, she flew great before then. Good control, nice autonomous flight, and great Altitude hold in Alt.Hold mode. But the day when i installed the Gimball, everything started to turn around. First i thought it was the issue with the gimball but then after digging through the logs, i found it was not the gimbal but something else.
Error:
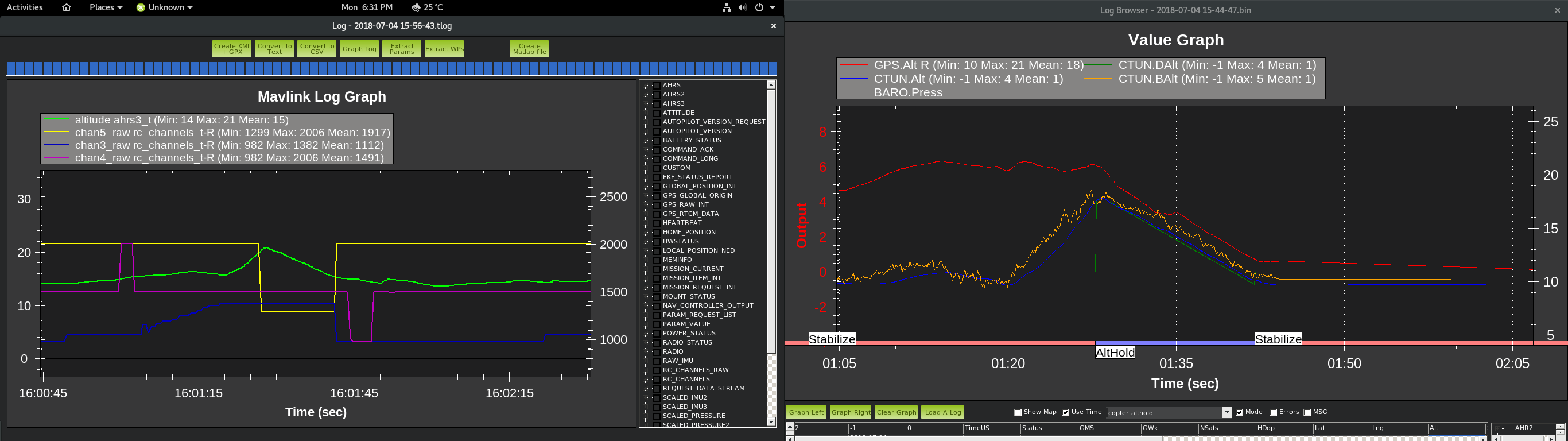
After plugging in the power we had around 3 to 4 flights. In the very first one, the altitude dropped in Alt.Hold Mode and i had to flip the switch before it was about to hit the ground. After that i tried 3 more flights. This time the drop in physical altitude of the hexacopter was rectified (i didn’t do anything), but the Mission planner keep showing drop in altitude. That is, from the second flight onwards, the physical altitude of the hexacopter was rock stable, but the data in mission planner showed a liner drop in altitude, which even went to negative values. Apart from all these i had the EKF error pop many times during flight (if i remember it right).

From Log:
From the log it understood that, in the first flight the CTUN.DAlt (desired altitude) dropped and the hexacopter followed it (Dont know why the Desired altitude dropped, as there was no reason to drag it down for the controller). And in rest of the flights, the CTUN.DAlt was constant and she stood rock solid in the locked altitude (but this time mission planner showed drop in altitude).
So guys, please have a look at this log file, and help me find the issue:no_mouth:.
Visit this link for both Tlog and Flog: link