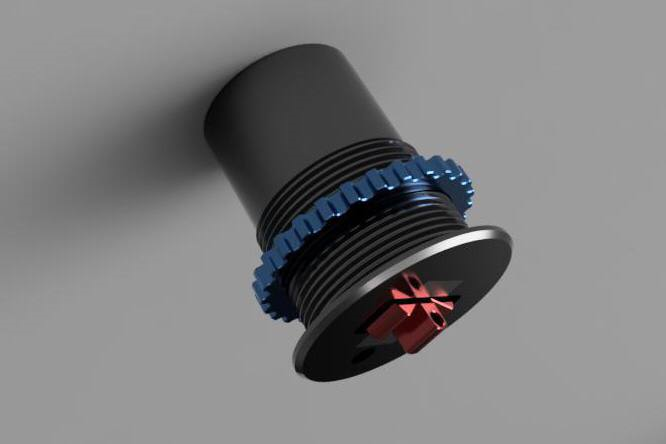
I started a project to create a device for measuring velocity relative to water. Earlier I saw that Ardupilot supports this type of sensors. At the moment I have made a body and will soon be testing on water (in the river). If there are those who wish, then join us! The project is posted on Github. I will probably show the tests in the future on my YT.
The principle was taken as a basis, as with the DST800 Smart, this is the impeller and pulse counting.
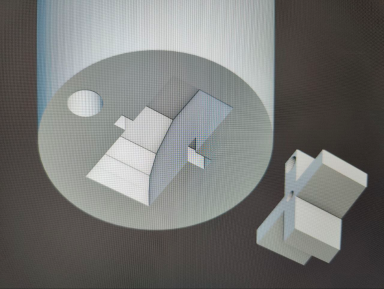
I made a simple 3d model. It’s not as beautiful as the original A temperature sensor will also be added.
Earlier I experimented with MS5837, these sensors are also supported in ArduPilot(Sub). There was even a topic to add support to Rover.
On the basis of these sensors and the Pitot tube, I made such a sensor. Its accuracy was acceptable . But since the pitot tube was for models, it was small. There were constant tube blockages. Because of this, the pressure was incorrect, and so were all the calculations. I refused it.
But it would be great to add support to the Rover.
Perhaps so. But I will output the data in NMEA format. I like it better this way it will be easier to work with electronic charts, in MP they are terrible (you can say they are not for the boat).
Hi, thanks for raising the issue. I think the code needs to go into the flight code though not mission planner. So I think that issue should instead be raised over here.
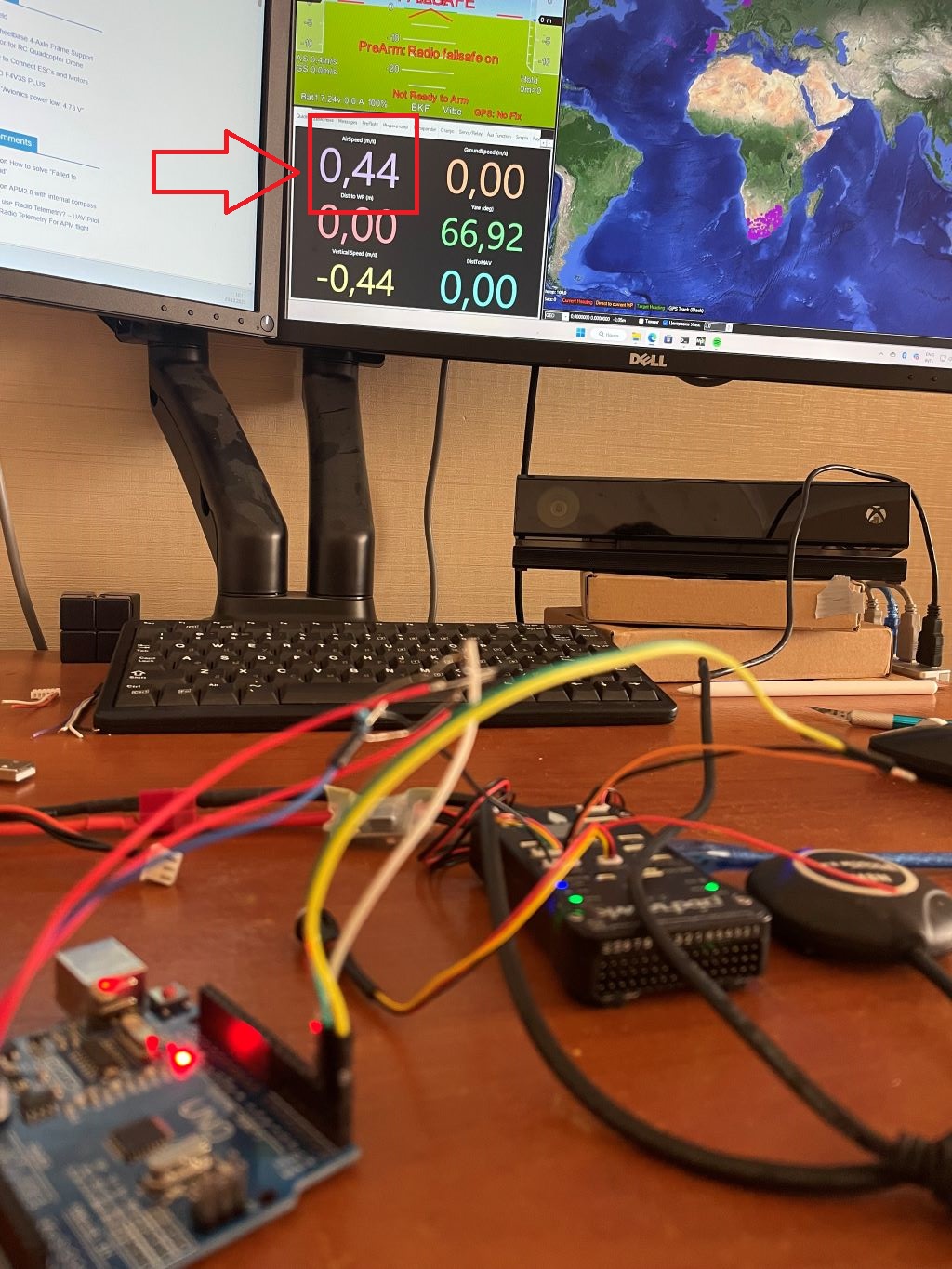
I tested the device, everything works fine. It remains to select the coefficient so that the correct speed value is selected. The data is output in NMEA format.
Hi. Good news. Tested it on the latest version(rover 4.4). Everything is displayed perfectly. I think in the future it will be possible to add a speed sensor to the reference information.
your water speed sensor is used like an airspeed sensor. It’s the same way I’m getting the pitot tube working on the tug. Unfortunately, I haven’t found an easy way to emulate it yet with an Arduino on i2c.