Hi @gnitzan
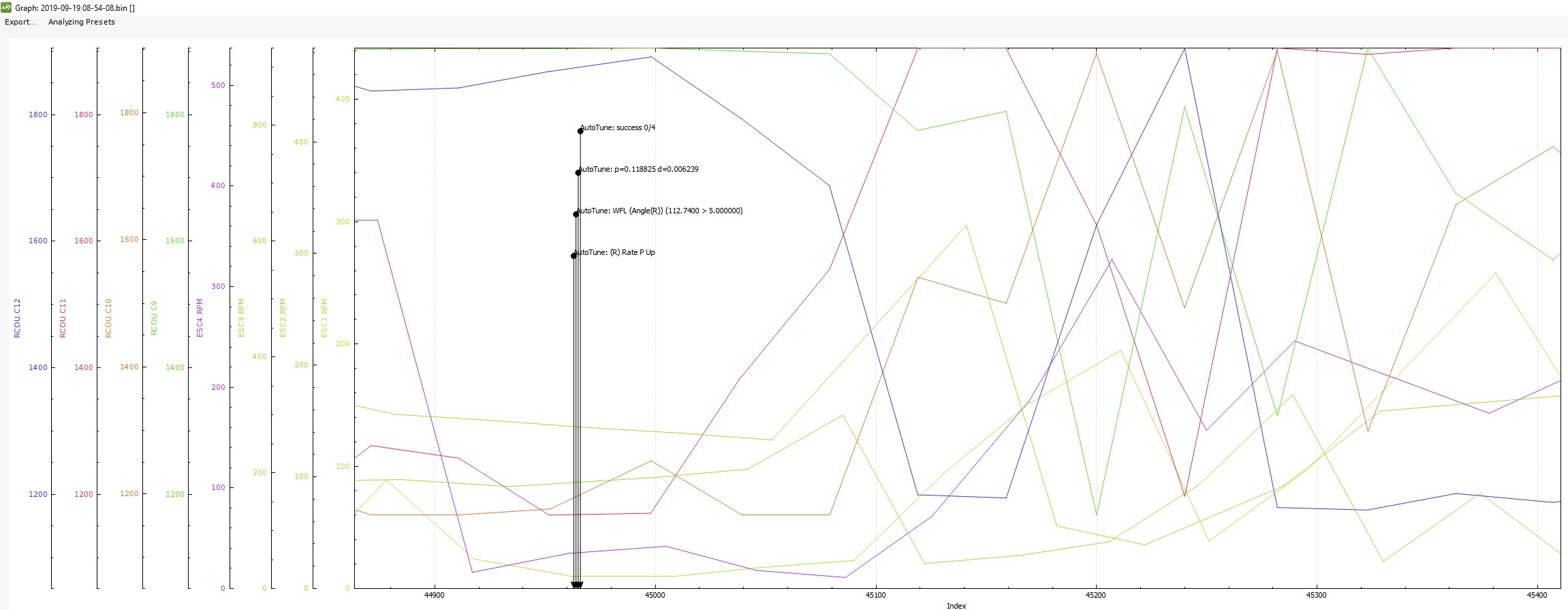
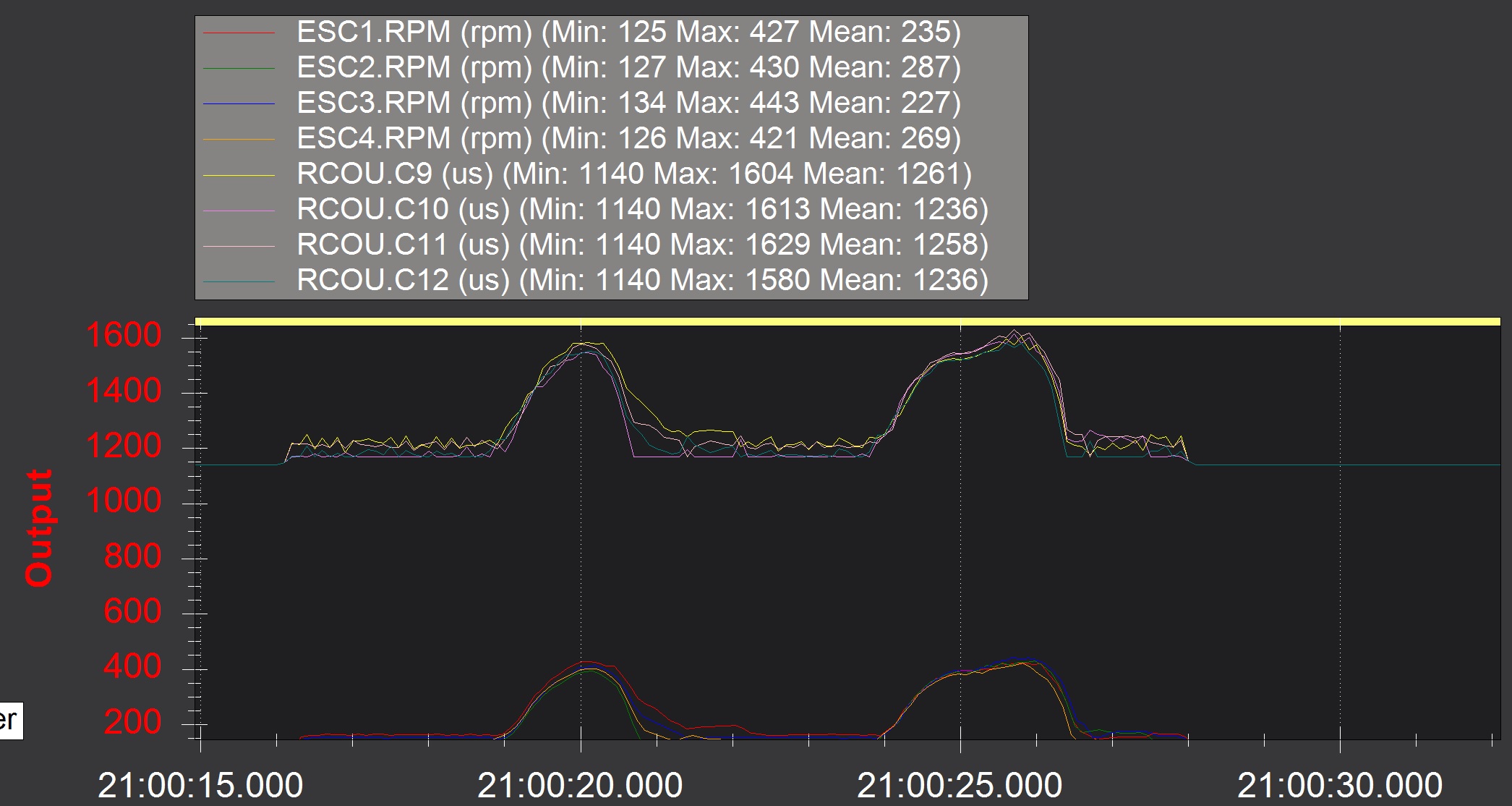
in your log everything looks good and unfortunately there is no any data of motors status (RCOUT)
does your copter suddenly started turning around ? or losing altitude to a side with a angle more tan 40 degree ?
you are corrent @gnitzan
also after replacing burned motors or ESC try to test all your motors and ESCs in mission planner motor test to make sure all of your motors are ok
Thanks @hosein_gh, actually I did motor test last night and all was well with no problems, I set test up to 50%.
Actually, I am not 100% sure what went wrong, because from telemetry, the motor was not stressed out, its temperature was like the other motors, so maybe ESC?
Agree with motor- esc failure;
if you cant find it; what I do: don’t try autotune until you be shure your failure was solved, put an extra protect thing under your quad, a X like student pilots use or a soft extra improvised legs near the motors to avoid flip and broke props and then try to fly near the floor over soft terrain for some time loitering, then doing soft movements pitch and roll, use all the flying time your batt allow, see what happens and share your log to see if any of Us can detect something after the next autotune, good luck.
For all who are interested.
I did yesterday in perfect weather a Autotune with a newly build Hexacopter ( 4kg).
FW: ArduCopter V3.6.10 FC: Pixhawk 1.0
Carefully balanced and trimmed, but using default PID,s
Takeoff in stabilize, switch into PosHold and than Autotune. Setup not aggressive but all 3 axis in one go.
Total time exactly 10 minutes. After saving the Autotune values I tested the Hexacopter in all modes and it is flying perfectly.
Need a test in windy conditions only.
I cannot find any problem with AC v 3.6.10.
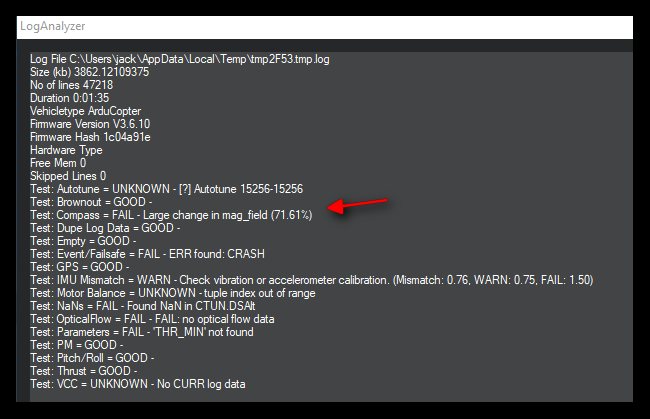
I am relatively new at analysis, but does the log analyzer reveal anything of interest to your initial experience? I note the change of mag field, or is this perhaps an artifact from the crash?
Hi Jack, actually I didn’t look at the log analysis, my bad. As you mentioned, it’s probably from the crash since I did a calibration right before takeoff.
However, THR_MIN not found and current not available I will. Anyway, good catch.
Thank you
Gal
lets test this problem on ground
arm motors in stabilize mode and rise throttle a little bit (we are not going to fly) when your motors rpm rised , change yaw stick and see whats happening (motor on will stop sniping or not)
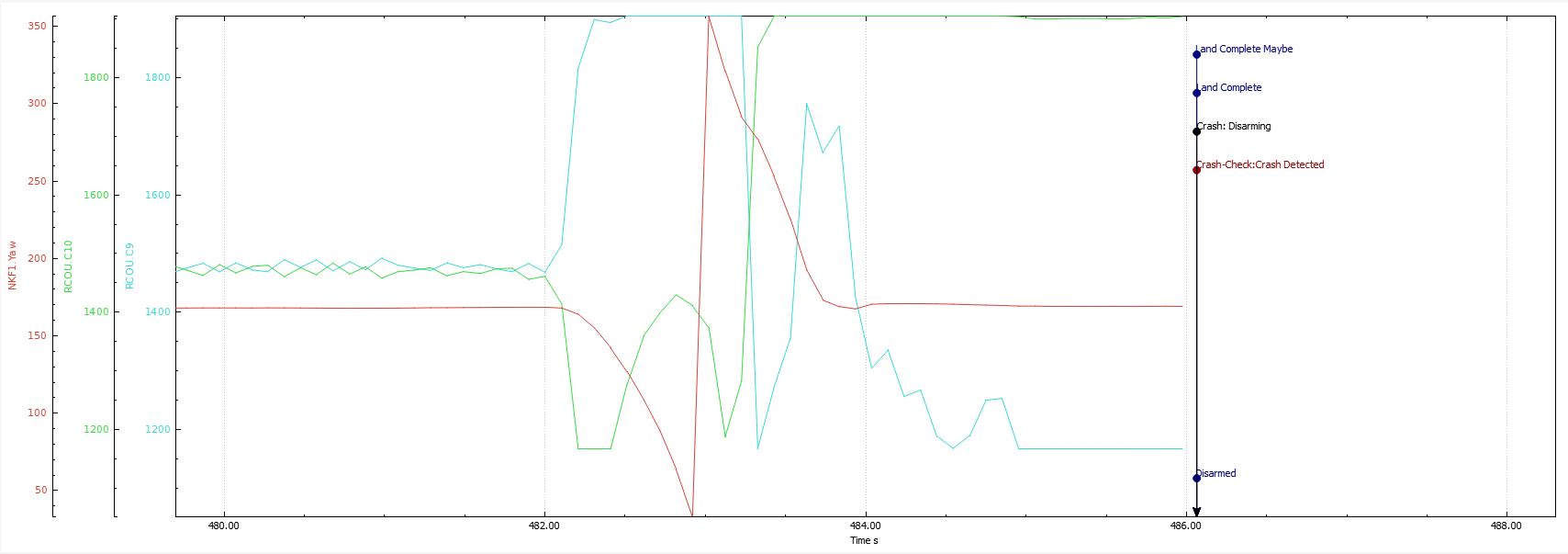
Hi @hosein_gh, something doesn’t make sense to me. Rcout is the pwm command sent to the motor, is it not?
In that logic, why did the fc sent this command?
RCIN is the pwm input by your radio and RCOUT is pwn output by FC to ESCs that trimmed by radio calibration (and some other params only in auto modes)
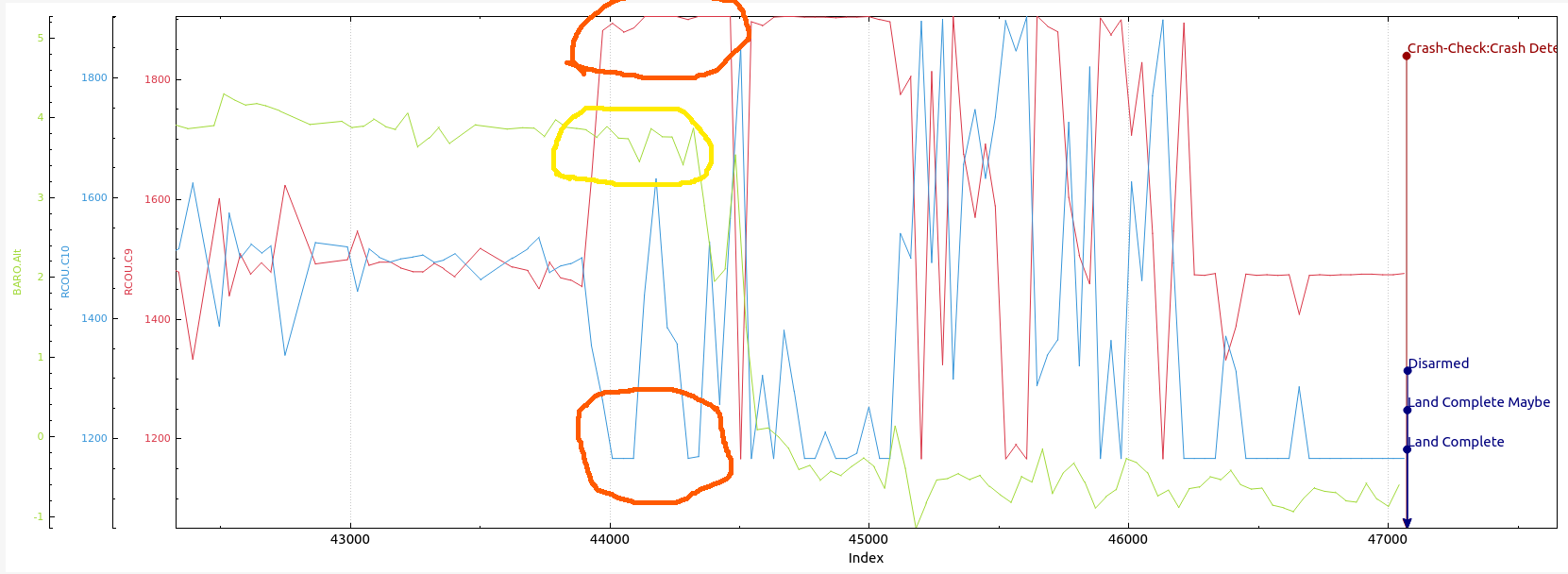
in the picture above when a motor or ESC stopped working FC automatically will put burned,stopped or damaged motor to max throttle and opposite motor to lowest throttle to keep the balance of copter but this method are not working with a quadcopter but in hexacopter and octocopter working well for example if one of the motors of a hexacopter stop working FC will stop the opposite motor and now hexacopter is converted to a quadcopter and can fly and land without problem