Copter is a quad approximately 15-20lbs and 13 inch props with 100 KV motors. I’m trying to tune the altitude controller at this point and not sure where to go, and I’ll admit I might have severe state estimation issues to iron out that might be masking issues. The quad frame is open and the cube sits almost in the plane of the props. I put a piece of cloth over the USB port to try to filter the baro but I might need to do more here.
I’ve reviewed;
- Initial Tuning Flight — Copter documentation
- https://youtu.be/PTUjHXT0M4Q?list=PLFPBjpbd5xKSGFJfuQJBPWOm-sGv0VxD1&t=396
- How to methodically tune any ArduCopter | MethodicConfigurator just to see if the Altitude controller was mentioned in more detail.
My problem
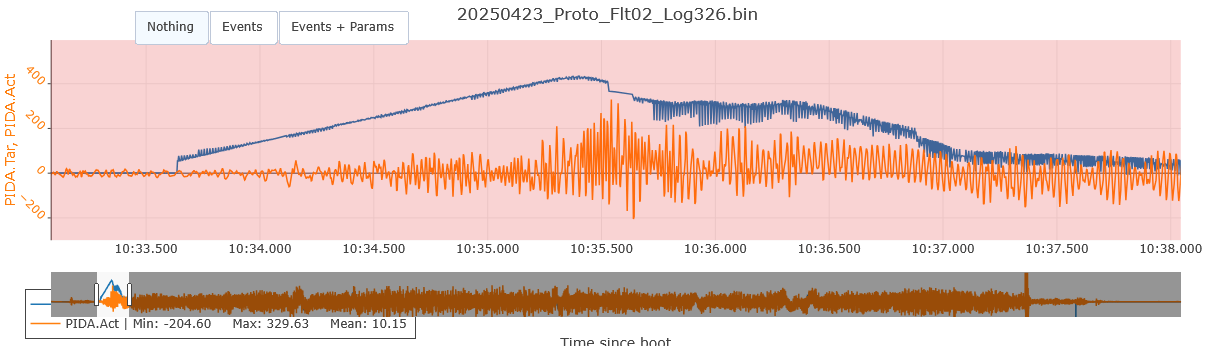
This is during takeoff, and it seems we never quite make it to our target altitude
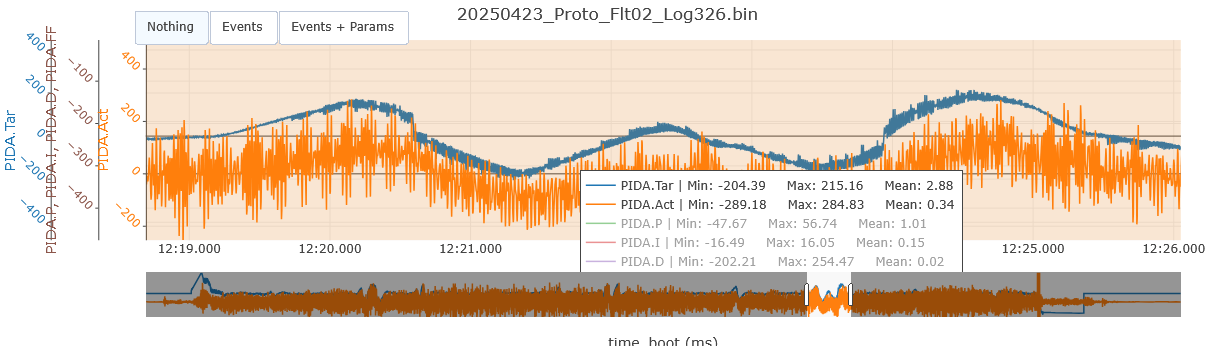
This is trying to issue step inputs in altitude, I recognize that the goal at the moment is to find the right PD balance, but since there’s so much noise and not real step inputs to compare for overshoot or undershoot, I’m not sure where to start. Please correct me if this is not the right mindset or approach to take.
My response seems overdamped, (and oscillating in logs but not visibly), so I’m going to try increasing the P term on my next flights, but that’s a shot in the dark. I’d appreciate any advice here, EKF, tuning, or otherwise.