Almost two years ago I posted about my first adventures with building quadplanes. I’m up to my fourth build of a Skywalker X8 quadplane now having tried a few different approaches.
This time around I wanted to move from using slower vertical motors with large props, such as I would use in a multirotor build, to smaller faster lower voltage motors with smaller props. I’m still using separate power circuits for the vertical and forward motors to ensure I always have enough battery power left to land with. I did have to upgrade the wiring to handle the additional current required by using 4S rather than 6S batteries for the vertical motors.
I’m also staying with wing extensions rather than under the wing mounting of the motor bars. The next few weeks I’ll be doing some flight tests of auto missions and testing how long and far this build will go. Here are the components I used this time around.
Single HobbyKing graphine 5.0A 45C 4S battery for vertical motors
Mauch current monitor. 60A draw during hover, 90A peak.
Approximately 5 minute flight time
Single or dual HobbyKing Multistar 8.0A 10C battery for forward motor
HobbyKing current sensor
14 Amp current draw during cruise with 40 amp peak
Forward motor – HobbyKing SK3 4240-740kv
HobbyKing 85A ESC
13x8 forward prop
Vertical motors – SunnySky 3120-1100kv with 12x4.8 props
Droidworx multirotor motor mounts (designed for round tubes, modified for square tubes)
HobbyKing 60A Plush ESCs
Wing extensions. 180mm width. Allows for use of up to 15” props. Increases wing area from 80DM^2 to 96DM^2 – 980mm 15x15 square carbon fiber booms joined in the middle with a 12x12 aluminum insert to strengthen area that carbon spars pass through.
Digital air speed sensor mounted in 3D printed mount available from thingiverse.com web site
Custom balsa mount to fit Sony A6000 camera with 16mm lens mounted near center of gravity
Pixhawk 1 flight controller (upgrade to the amazing Cube if you can)
ArduPilot 3.9.8
Ublox GPS / Compass
RFD 9000X radio modem data link
FRSKY X8R receiver
Additional 5V BEC to Pixhawk power rail and to power Mach power sensor module
Wing tips connected with posts and magnets
Empty weight 5kg. MTOW 7kg.
Max flight time with two 8A batteries approx 60 minutes
Max flight distance ~60 kms
Cruise speed 18-20m/s – Stall speed 14m/s
Vinyl covering, same as used on cars
Wing tape on top and bottom of wings for additional strength
Elevons connected with hinges and tape
Elevons controlled with dual digital servos (one additional to stock airframe)
@Darrell nice job, you mentioned that you had separate power circuits for the vertical and forward motors. Are you saying that you have two separate batteries for vert and forward flight? Did you wire both to the pixhawk’s power module or just one or neither?
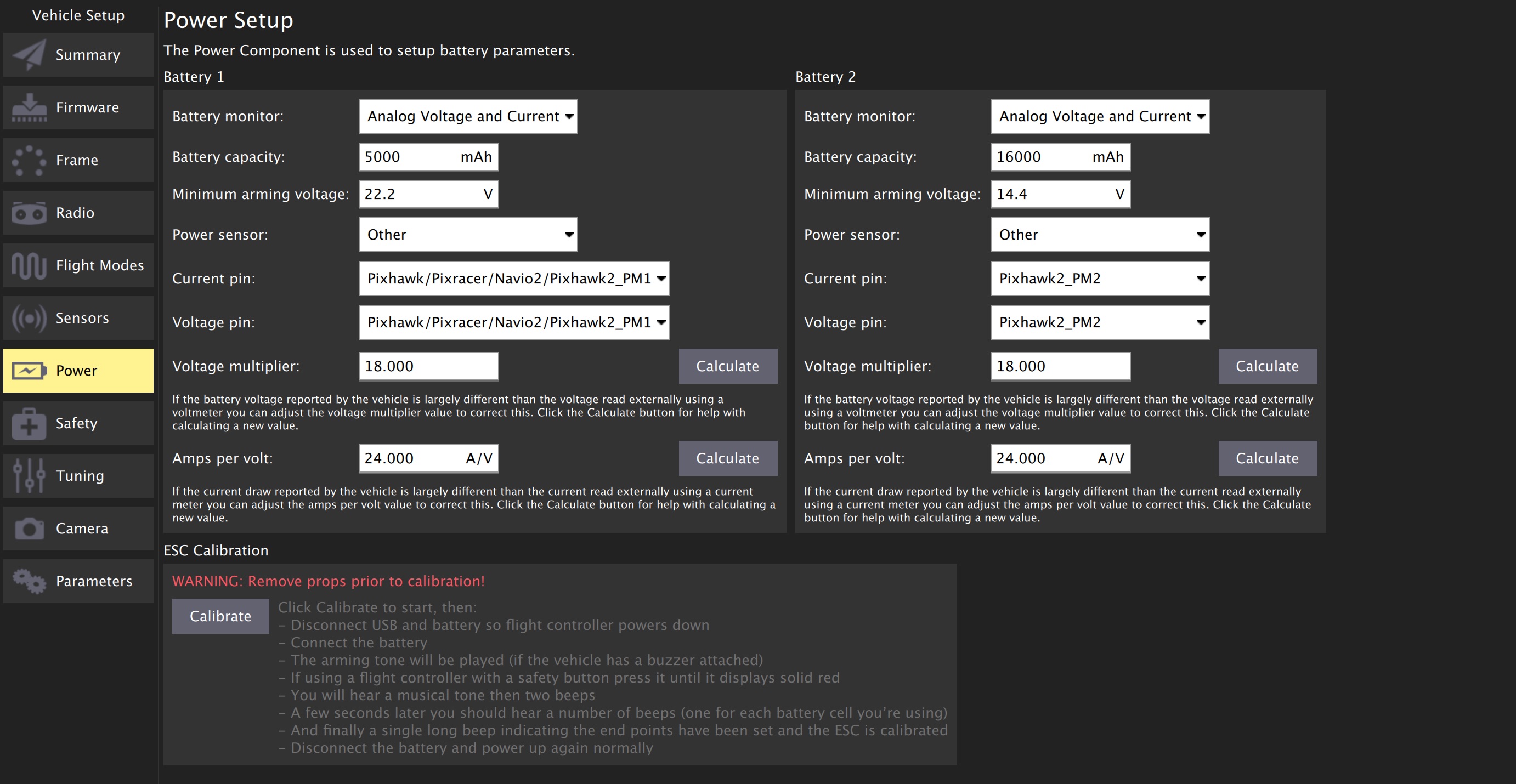
Yes, two totally separate power circuits. I have two 8A 10C batteries in parallel for the forward motor connected to a Pixhawk power module and a single 5A 45C for the vertical motors connected to a Mauch 100A power module. Both power modules are connected to the Pixhawk so I can monitor voltage and current.
@LuisVale that is what I thought @Darrell was talking about when he said a Mach 100A power module but I wasn’t sure. If you have separate batteries for vertical and horizontal propulsion do you actually need to have both hooked up, via a power module, to the FC? Can you have just the horizontial propulsion battery connected via PM and then just have the vertical battery connected straight to the ESCs, essentially just winging it in terms of knowing how much hover time you’ve got?
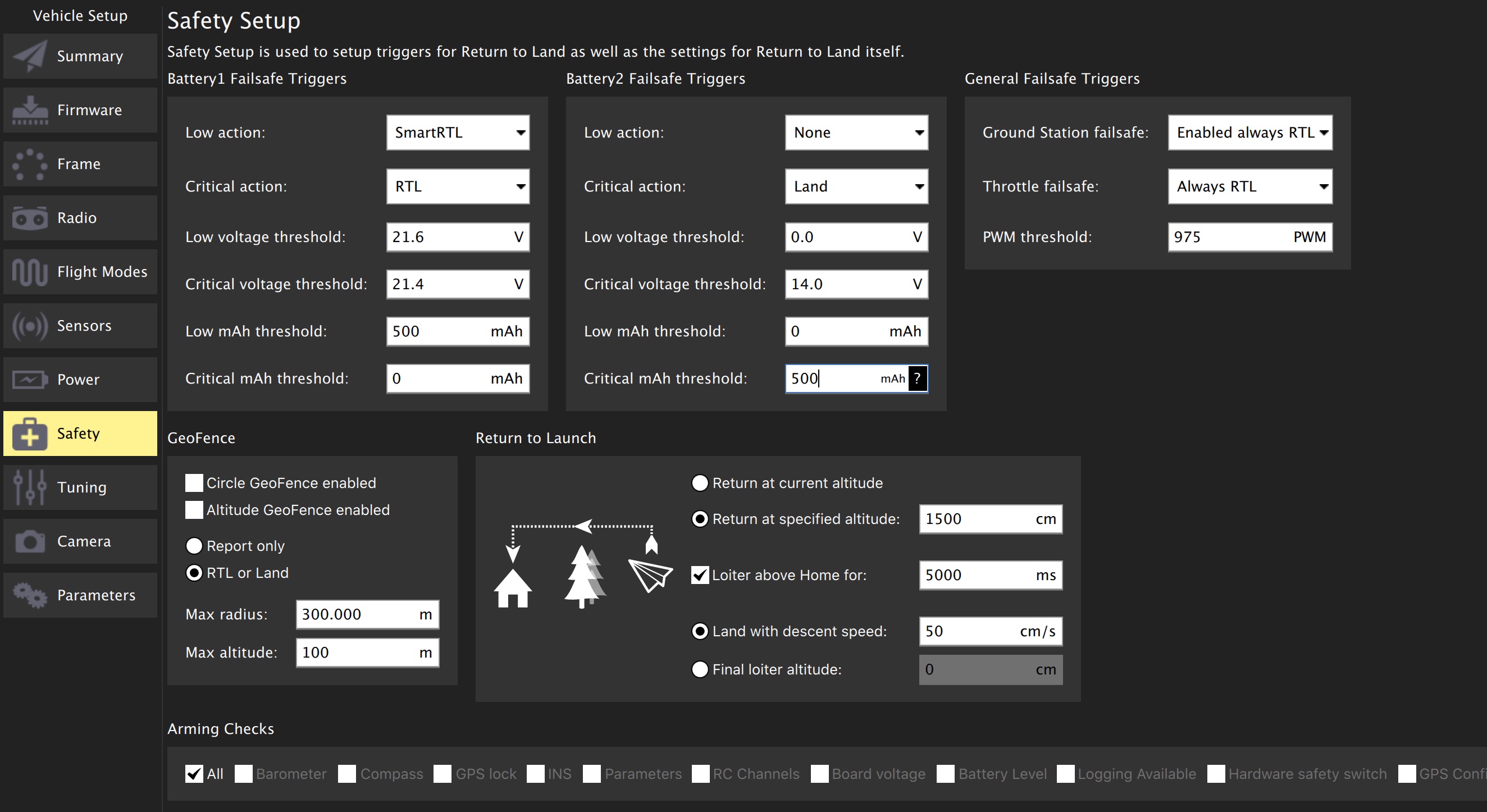
I would still be using the 2 power modules and configure each according to its settings, because we want Failsafe to be triggered by different conditions on each one, and recent versions of Ardupilot allow the use of different settings for each power module connected
Yes, you are right. It’s not a requirement to have a power module for the battery used on the vertical motors. I’ve never actually referred to info it provides in flight. With vertical flight I know the time the battery will last from test flights and that it is good for two take off and landings, if they are quick. My goal with quadplanes is to get up in the air for transition to forward flight quickly and to land quickly. The less time in hover mode the better as far as I’m concerned.
I have the power module connected because I’m doing comparisons of different motors and I like to check the logs for current draw and voltage drop of the batteries. The more data the better.
Currently, we are using the same setup and only have a power brick on the forward motor.
However, I am seriously considering installing a second power brick on the multi rotor part. It will give the following advantages:
monitoring the health and condition of the multi rotor battery.
have a secondary power to the pixhawk for redundancy.
I just recently learned the Cube doesn’t have redundancy from the servo rail which resulted in a serious crash. So to use the multirotor part to give redundancy would be a very good solution.
Hello Darrell, I have built three Vtol using different airframe, and I am curious about two important issues:
Why you change from 6S to 4s? As we understand that using 6S will lower the current which is good for the battery.This is more relevant because your AUW is 5-7 kg. It needs very big current during take off -hover-landing. Any special reason you change to 4S ??
You also change the vertical motor to be very small for 5-7 kg Vtol. Do you think if we use 15" prop. may cause too much drag???
Regarding the power system, I agree with you to use two power system. My Vtol also use two power modules, while the second power module connected to ADC 3.3 v on Pixhawk. So we can activate the second power (Batt2. on mission planner).
Regards,
The purpose of this build was to experiment with smaller motors spinning faster and using smaller props. The Sunnysky motors also are lighter and cost less than the T-Motors I was using. The motors are why I changed to 4S as that’s what they require. I also wanted the flexibility in configuring the power to come from combined batteries or keeping them separate for vertical and forward so it’s nice to have it all 4S. A large part of my reason for doing this test was watching how the commercial version of this build was coming along. We were building more or less at the same time and I noticed the DeltaQuad went slightly different directions. The DeltaQuad really impresses me and they seem to have come up with a very good design. I don’t think you will have issues with 15" props. I was using 14" with the slower T-Motors running on 6S and that worked just fine.
Hi Darrell thank you for your information. Have you got conclusion which one is more efficient between 4S and 6S for this 5-7 kg Auw Uav?? I am also impressed with the Delta quad system, especially how they can achieve 3 hours flight time with 6 kg Auw? I really eager to know what size of props. do they use for forward motor and for the quad. Also what kv motors do they use for forward anf also for the quad.
By the way, you mention that in Cruise mode (Fbwb) the current is below 10A using 14x8 prop. could you share what is the ground speed (based on Gps) is this 4S or 6S configuration? I suggest you try also 13x10 prop. for forward motor to make it more efficient. Do you use airspeed?
I fly large multirotors so when I started this project I built the vertical side as I would with that type of airframe. Specifically, slower KV T-Motors with large props using 6S batteries. That worked quite well. But watching the DeltaQuad made me wonder why they went a different direction as it’s obviously very well engineered.
Now that I have tried smaller faster motors with smaller props I think I’ll continue with them. The reason is that this is not a multirotor and the vertical side is designed to get you in the air and to land, not to fly around like a multirotor. I’m now using Sunnysky 3120 1100Kv motors with 13" props running off 4S battery. This saves a bit of weight and the motors cost less but it does require wiring that can handle the high current. Hovering requires 60 amps and it can peak to 90 amps.
The airspeed was 17m/s when drawing less than 10Amps during cruise using 4S battery. I do use an airspeed sensor. I’m using a fairly large forward motor, HobbyKing SK3 4240 740Kv.
Thanks for the tip about the forward prop. I’ll definitely give that a try.
Hi Darrel, Thank you for your sharing, what is your gps ground speed when your airspeed sensor is 17 m/s ? I also use many Sunnysky motors, as they have good products. But I am curious that you use SK3 (HobbyKing/Turnigy) motor for forward motor. Do you think that motor is better than the Sunnysky motor ?
The ground speed would depend on how much wind there is as the plane is flying by airspeed. I only use the HobbyKing motor because they are easy to source in Australia.
You are right. So basically Q_Assist only refer to airspeed sensor. But the problem (at least me) is some times it is not easy to have good quality of the AS. Any suggestion what is good /reliable airspeed sensor? Any link of vendor would be great. Tks. Darrell.