I believe the airspeed comes in an analog and digital version. Just make sure it’s the digital version. I usually get them online from eBay, GoodLuckBuy or HobbyKing Airspeed Sensor etc. They don’t seem to have a brand name, just generic devices. When using an Air Speed sensor it’s critical to do a ‘preflight calibration’ each time you fly with your hand cupping over the air speed sensor but not touching it.
Using an airspeed sensor on a quadplane does create an issue of how to place it given you don’t want the vertical props to influence it. I had the following Airspeed Sensor Mount 3D printed for my build.
Hi, i have to say i’m really impressed with your work!
I have the X8 equipped with:
scorpion 4020 540KV main motor
APC 16X8 propeller
scorpion commander 110A ESC
PIxhawk 4 with ArduPilot 3.9.8
DragonLink V3 data link
Mauch 100A current sensor
I’m now working on making my X8 VTOL myself using your post and there are a lot of questions regarding your built that might help me go through this process. sorry in advance for that mass of questions:
Why did you use both Mauch and the HobbyKing sensor? to measure the seperated power system currents?
why did you choose these specific motors for the VTOL?
Why did you make the wing extension 180mm and not less or more?
are the VTOL bars 980 mm each? Why this specific length and not more or less?
Did you change anything with the original carbon bars for the wings?
What is the wing extension made of?
I didn’t fully understand the way you implemented the aluminum reinforcement for the carbon bars?
What is 12X12 (Aluminum inserts)
How much weight did the VTOL system added to the complete plane?
What is the original X8’s stall speed (without the VTOL system)?
How did you plug the VTOL to wing and the VTOL to fuselage interfaces (to the original plastic hooks?)?
Is the air speed sensor crucial? what contribution does it have?
Thanks in advance!
Any tips and help will be appreciated!
I use two power boards to measure the vertical motors and forward motors separately. HK sensor is rated to 60Amp only so I use it for the forward motor. The Mauch is rated to 100Amp so I use it for the vertical motors, which hover at 60A but can peak to 90A.
On this build I choose these motors to see if I could get smaller 4S motors with higher Kv to work as used in the commercial version of the plane, DeltQuad which is a very impressive build. I normally use 6S slower T-Motor with large props and was very curious why the DeltaQuad used smaller motors with smaller props spinning faster and using higher current 4S voltage. This configuration appears a bit lighter but honestly, I don’t see much difference and I am having a heck of a time getting the smaller motor setup tuned properly.
I made the extensions a bit larger to accommodate larger props. But even with the smaller props I like them as it adds more wing area/lift. I was hoping the extra lift would give me better flight times and a lower stall speed. I do mapping and it’s important to fly slowly to allow the camera to keep up.
Yes the motor bars are 980 mm each. The length is to accommodate the prop size, especially keeping the forward motor away from vertical motors.
5/6/7. Yes. I actually use two 500mm CF 15x15 square tubes. I join them by inserting a 230mm 12x12mm aluminum square bar in to the CF bars. The trick to getting the 12x12 tube in to the 15x15 is to shave the corners of the 12x12 a little bit. Then it will slide right in. The reason I do this is that I drill 10mm holes in the CF tube to slide the spars through which is a huge bite out of the tube and will weaken it. But with the 12x12 tube inside it’s extremely strong even when drilled though. I’ve tried just attaching the 15x15 to the spar but you don’t get nearly as stiff of a build. The goal here is to limit wing twist which is a serious issue with quadplanes.
The wing extension is cut by a local foam company on a CNC cutter. I took the wing joiner from the Skywalker to them and asked them to use it as a guide for the wing shape. They use a type of foam which is similar to EPO but a bit denser. But you could use just about any foam and then wrap it.
The wing extensions with SunnySky motors come in at 880 grams each.
The stall speed of an X8 is about 14m/s
I use the standard Skywalker wing joiners to connect the wing extensions to the fuselage and wing. You can find them on eBay for cheap. Make sure you sand the plastic and the foam before gluing them to give the glue a better grip.
The plane will fly fine without an air speed sensor. The advantage of an airspeed sensor is you will get longer flights in wind with one and better stall detection on turns. But I fly without one all the time and it works just fine.
That’s difficult to answer. Please read the section on tuning in the quadplane doco. It should take off fine with defaults but I’d recommend you do an autotune with the wings off. I have just finished another build today and I’ll be doing some tuning next week. I was thinking about doing a video of the process so that will probably be of interest.
Well, more like 2.5mm but it varies. Anyway, you will find that the 12mm fits very nicely in 15mm square tubes.
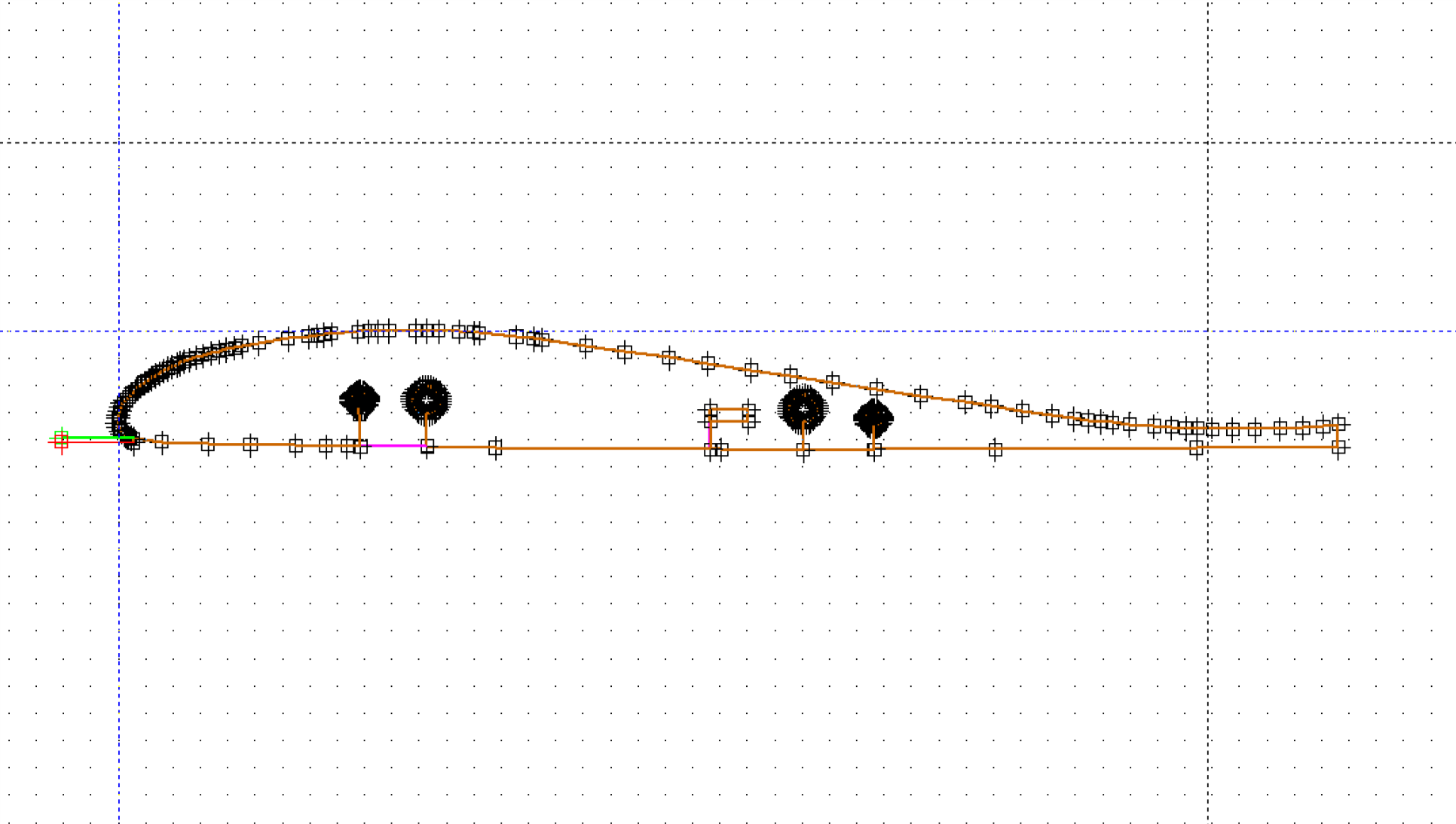
Have a look at this photo. The top bar shows the internal black aluminum bar sticking out of the right 500mm CF tube. It has about 120mm inside the tube and another 120mm sticking out of the tube which will end up inside the left 500mm CF tube. I get this section of aluminum tube from HobbyKing. Make sure you use a drill press to drill through the CF and aluminum tubes as it’s critical that they are perfectly vertical and centered. That photo actually shows 12mm spars going through the tube but the correct size is 10mm which is the size of the spars that come with the Skywalker. You will need to buy a longer rear spar for the build to accommodate the wider wing span.
I don’t have the file but they said they would give it to me. I’ll give them a ring and see if I can get it. They charged me over $400 for the time it took to create it so if I can get it that would save your a lot of time/money.
Well, Ardupilot does have some sophisticated way of calculating air speed without a sensor but that’s over my head. My understanding is that if you are flying in to wind and not using an airspeed sensor the plane will be flying faster than it needs to as it will be calculating speed by ground speed. Basically an airspeed sensor just adds accuracy to the flight and that will give you slightly better flight times. Hopefully someone with a better understanding of it will give a better explanation.
Hello Darrell,
Just to update recent discussions, last time you mentioned that the Current consumed during Cruising of the X8 is about 10A right? Is it based on 4S battery? If it is 4S that means the power is about 148 watts right? Is this best so far, or can you get better/lower power (more efficient) during latest test? I think 148 watts during cruising at 17 m/s is good, however I try to do testing for a better efficiency (needs more time). I have checked again, and found that the Delta Quad also have similar power consumption during cruising, about 150watts. Did you use the SK3 (HobbyKing/Turnigy) motor 500Kv or SunnySky as forward motor during that time??Regards,
I’m using a HobbyKing SK3 4240-720 for forward motor. From what I’ve seen it would be quite difficult to get a 6.5kg plane with this size wing area to cruise at less than 10 amp current. I get about an hour of flight which gives it about 60kms of flight. How far do you want to go?
Just to confirm again, this is based on 4S battery right? Which means about 148 watts? Are you using 14x8 propeller right? Is it from Apc or other brand? I believe propeller size and brand is one key point to get high efficiency.
I just checked my plane and the forward prop is actually a 14x7 not 14x8 as stated above. I’m tuning a new plane tomorrow and I have a 14x8 prop on it. I’m not sure if I’ll have time to do forward flight with it but if I do, I’ll let you know the results with the 14x8 prop as I suspect they will be better. I’ve also calibrated my current sensor so the results should be more accurate than before.
Have you tried prop. 14x10. I believe it is better than (more efficient) than the 14x8. Beside that I also want to do testing using prop. 13x10. That is still On my to do list…
For those interested here’s a wdf file that the foam company I use to make the wing extensions created. I think it’s an AutoCAD file? Please note that the holes in the wing for the spar are 12mm as I put a small section of 12mm spar inside for the main 10mm spar to slide through. This is because I use a type of bond to seal up the slits created by the foam cutter and it would stick to the spar. If you want to seal up the slits some other way and not use the internal 12mm tube then you will want to reduce this hole to 10mm. Here’s a screen shot of the file:
How are your tests going? Did you try the 14x8 prop?
I want to build one that is 7kg MTOW (larger payload), what setup do you recommend for electronics that I use? I am thinking 6S Lipo for vertical, and 6S LiON for cruise… What are your thoughts on it?
Also have you had issues with over heating having the ESCS in the fuselage?
I was getting good results with a 14x8. I’m planning on testing a 13x10 this week.
I think 6S is good for vertical motors. LiON is good to get max range of course. I have had issues with ESCs getting hot, yes. Indeed, I think a recent crash where I was running an autotune on vertical motors may have been caused by a thermal shutdown. One motor stopped and we aren’t sure why. Auto tuning takes 8-10 mins which is much longer than I would ever use the vertical motors during jobs.
I was considering cutting holes in the airframe where I have the ESCs mounted. However, I’m in the process right now of switching out the 60Amp HobbyKing Plush ESCs to the new Holybro BLHeli digital ESCs as a test. They are quite tiny and provide telemetry back to the flight controller about temp, rpm etc. It will be interesting to see how hot they get as they don’t have heat sinks on them. They are quite small and I think they are actually designed to be mounted under the motors so that they are cooled by the prop wash.
Hi Darrel,
Are you using the new Holybro 65A Tekko32 F3 Metal DShot1200 BL Heli32 This is really interesting to know the performance of this small (only 14 gr) Esc. If you don’t mind, Please update the performance of your X8 with new Esc and 13x10 prop. (are you using Apc prop.?). BR.
Yes, I’ve just installed the Holybro Tekko32 ESCs. I’ve run them on the bench and they don’t heat up nearly as much as the HobbyKing Plush that I was using. But with the included telemetry I’ll have the exact temps in the logs which will be nice.
The prop I’m going to test is a Master Airscrew S2 Series 13x10. It’s going to take at least a week as the weather forecast is very windy and I’m going to do extensive testing/tuning on the vertical motors before test forward flight again.
Darrell, how to get telemetry data from the Esc? How is the wiring from the Esc to Pixhawk to get this telemetry data? I plan to use the similar Esc but the smaller one 45A Holybro Esc, because I will use 6S battery. Tks.