Hello, I am trying to connect three vehicles (quads running Arducopter on Pixhawk Cubes) to QGroundControl using RFD868ux radios. The radios are running standard point to point firmware so I have three pairs. The ground radios are connected to a desktop via USB hub.
So, to begin with, with default settings (only difference is NetIDs which are unique to each pair and the SYSID_THISMAV param, which is unique to each Pixhawk) the performance is horrible. A single vehicle is OK. With two, some commands get dropped and you can tell the difference but it’s kind of OK. With three, forget about it, a command might get through occasionally but by and large, it’s hopeless.
I have searched online but cannot find anything on what settings are best for such a setup. I have fiddled around and got somewhat better results by doing the following but have found nothing really definitive yet:
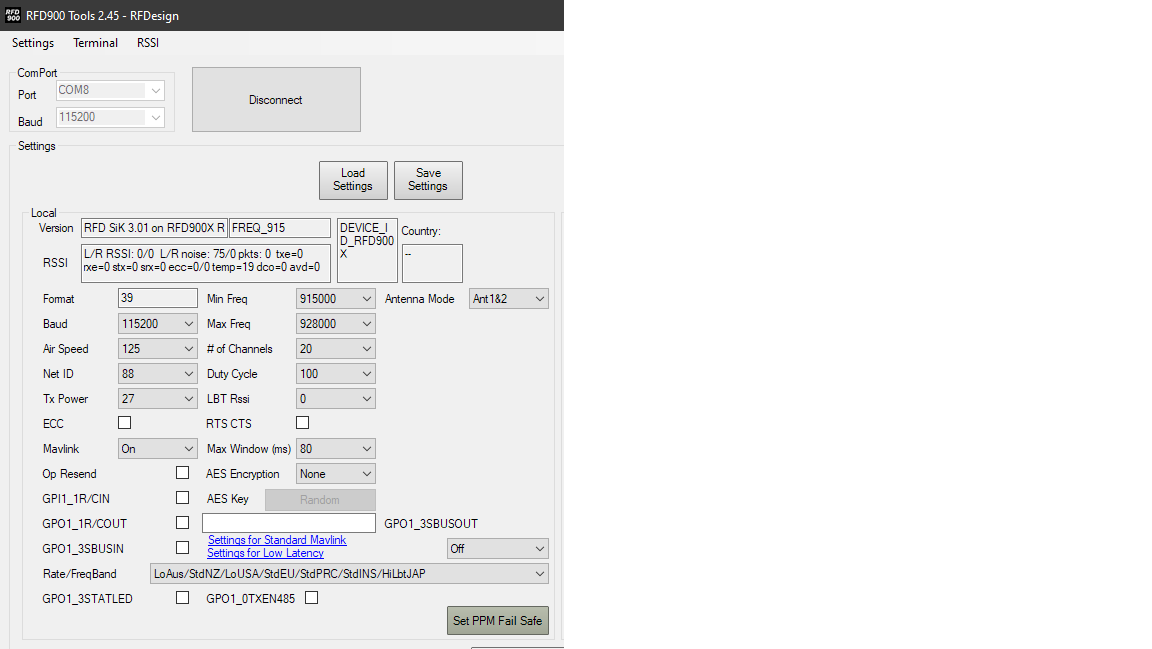
Increasing hopping channels (default is 1, increased to 7).
Shortening the duty cycle (default is 100%, shortened it to 10%)
I am also considering:
Adding Listen Before Talk (not sure what value).
Manually assigning a unique frequency range to each pair.
Perhaps flashing with multipoint firmware.
Before I go fumbling blindly, does anyone have any tips on what settings to play with? The RFD radios have astonishing performance when used in a single vehicle and I 'm sure using them in multi-vehicle setups couldn’t be that hard.
I suspect you are getting radio interference by having 3 radios right next to each other on the ground.
Setting each radio to operate in a unique frequency range will help with interference but you will loose a lot of your data bandwidth, so your coms might be slow.
I have not done any multi vehicle setups so I cannot offer any insight into those settings.
Are you getting steady telemetry data from the 3 aircraft?
With the 7 channels and 10% duty cycle I get reasonably steady data but it’s nowhere as good as single vehicle. QGC shows the radio status including an “Rx errors” field. In a single vehicle setup, the errors are typically 0 or 1 and don’t change much. With 3 vehicles, I see them going up at around 4-5 errors per second.
Thank you Shawn, I will definitely look into that. However, I am puzzled that I have not seen anything about SiK settings on the web. For example, look at Ardupilot’s own documentation here. As far as I can tell, these are three vanilla radios, not running multipoint, ridiculously close to each other, seemingly without any problems. I am guessing that if that setup needed extensive fiddling with the radio params, it would be mentioned somewhere.
Carefully read the RFD doco about multipoint, and you’ll be able to increase the baud rate quite a lot over standard 56k too. Range should still be OK as per:
Baud rate Air rate and Max Window settings something like this:
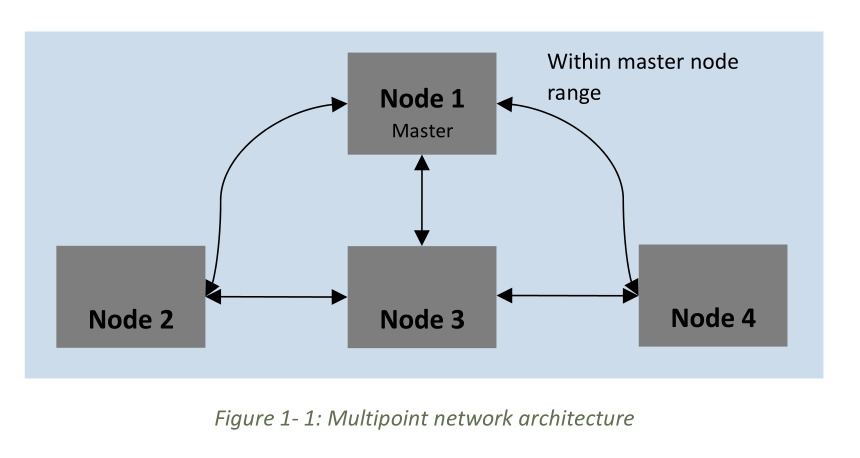
So, just to close this thread, I tried multipoint and the setup was fairly straightforward. I assigned a unique node id to each radio and then on the master node, did AT&M0= 0, Z, where Z is the number of nodes. It worked fairly painlessly, however, I have reverted to P2P so never got round to testing at range.
I found you are the only one on Internet who gets run the multipoint firmware. I’m trying to connect a RC transmitter to a UAV, via one Relay (GCS->Relay->Vehicle), but with the multipoint firmware I’m unable to activate the RCIn and SBUS on the receiver and on the transmitter, far away of using some signal converters to use only telemetry port to rc…
May you give me some tips on how to configure this modules?
So, how do I suppose to control my UAV then? I’m thinking on converting some PPM signals into something other signal to send it via RFD and on the UAV use other converter to drive the UAV… May do you suggest me something else I can do? I want to create a net using three RFD modems, one on the radio transmitter, other as relay and the third as UAV receptor… Any help? Thank you very much and I wish you a happy new year!
We will work on different scenaries, but for first attemps we want to drive a unique UAV on BVLOS using another UAV as relay. I don’t know if we can manage to use a relay using P2P firmware, that’s why we are trying to use MP firmware. So, it’s for long distance flights.
Distance will be different each flight, but perhaps about 70-80km away.
Depending on the terrain and altitude of the aircraft you might be able to do that distance without a relay. You might need a yagi on a pole at the groundstation, and there’s also 5dbi and 8dbi antennas but they are very long
Do you need RC Control (like a TX MOD) or just a ground station/mavlink connection ?
A conventional RC receiver would be OK and just set the failsafe options suitably.
Probalby we will be able to do it without a relay, but due the nature of the investigation we are developing, we want to do it using a relay as connector of both GCS and UAV.
I’m trying to configure all the links using a FrSky Taranis with the TX MOD, but it won’t be the main transmitter on future.
Do you think I will be able to do what I’m thinking?
Check the documentation carefully. I dont think you can do RC control (PPM or SBUS) when using the asynchronous or mesh versions of the firmware. You would need to use a conventional RC transmitter and receiver, and relay on the mavlink data and GCS once the RC link goes out of range.
Set the failsafes accordingly. Plenty of operators use the RFD modems in this way for very long range flights (but maybe not the mesh network).
That’s why I was asking about the distance… I believe the TXMOD does not have firmware versions for async and mesh.
If you do use the TXMOD for RC control be sure to use SBUS instead of PPM.
Thank you for all the support. Looking at this we have to change the way we wanted to use them.
I don’t understand about “relay on the mavlink data”. So do we use RC transmitter and receiver with P2P firmware but, in case the conection is lost, they switch to the relay like: RC Transmitter ↔ Relay ↔ UAV Receiver?
I’m newby with RFD modems and the documentation is not well explained.
I just meant the RFD radios…
I phrased that poorly.
So you’ll have a long range mesh network of RFD radios (mavlink data), and shorter range RC Control link.
The easiest way would be to use Mission Planners Joystick capability.
Make sure all UAVs and GCS have unique Vehicle IDs
1.Make sure all UAV of same class Plane (QPlane included), Copter etc. share control scheme at least for flight controls, safety and functions required for safe landing.
Connect the RC radio to the PC as a Joystick
Connect Mission Planner with appropriately configured mesh RFD to all UAVs
I had this same issue. We were able to get multipoint working and talking with Mission Planner, but we can’t use PPM so it’s useless for manual missions.
The only quick work around I can think of is adding a set of radios just for RC channels.
I told with the developer and he send me two options: one of the is to use two pairs of RFD, on pair from GCS and Relay, and se second pair Relay to Vehicle (in this config you have to conect both 7-9 pins in the other modem switching RX/TX to TX/RX). The second option is to use GCS with the controller as joystick, but I wasn’t unable to drive the vehicle when it isn’t not in range of the GCS (trhough the relay), the relay is unable to send the rc inputs but it sends back the telemetry…