Yes, the problem is that the RC transmitter is not correctly configured.
Use Radio Control Calibration — Mission Planner documentation to diagnose it, not the method you describe after 2:20.
I have done that. The RC transmitter is calibrated, as I showed int he pictures I posted above. I found the RCMAP options, but everything seems set as it should be there under AETR defaults. The diagnosis is clear: the RC transmitter does not control the drone’s FC unless it is in improper settings. The question is why.
I will repeat myself here…
- If the receiver is correctly configured and the Radio Control Calibration — Mission Planner documentation is done and each stick works.
- if the mission planner motor test works (and the video depicts that)
Then the copter will work.
The problem is your invalid test methodology.
I’ll repeat myself here as well, I have done the things you suggest, and the issue persists. Because it SHOULD work doesn’t mean it WILL work, and the issue is to find out why it isn’t doing what it should be. This is simple troubleshooting. I’ve been troubleshooting aviation electrical and avionics systems since 2003. I understand my issue and know it exists. You definitely don’t simply say the problem doesn’t exist because you don’t know why it does. Thank you. I appreciate your help so far, but it’s no longer helpful.
If you know what test methodology I SHOULD be using, feel free to illuminate the subject.
The way to test this is to put the props on, arm the vehicle and almost takeoff in stabalize flight mode.
It is described in the Tips For New Pilots — Copter documentation and section 2.16 and section 3 of How to methodically tune (almost) any multicopter using ArduCopter 4.4.x
The control loop needs to be closed in order to get the expected behaviour.
How can I take it for a stabilizing flight if I can’t control it? How can I take it for a maiden flight if the transmitter can’t command the drone to fly in the first place?
According to this picture 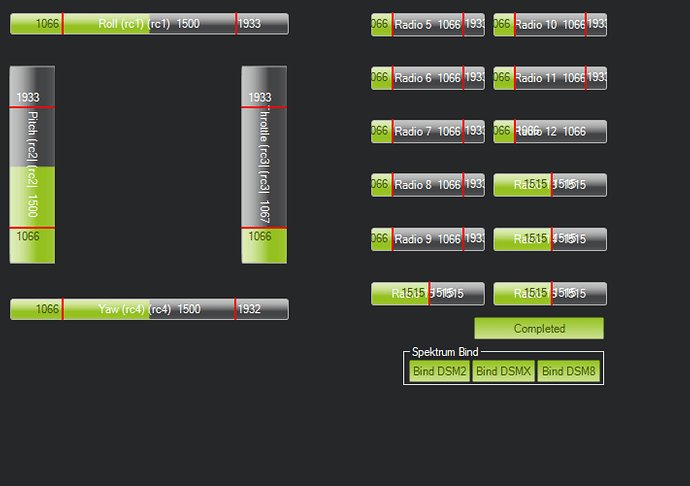
your RC transmitter and receiver do work and the sticks do control the copter.
I don’t think I have anything to apologize for. I am telling you about my problem, and you’re showing me information on how it SHOULD work and how it SHOULD be fixed, but those methods are not changing the issue.
Even with propellers on the drone, the motors only respond to RC transmitter inputs when set to RC3IN for servo function. When servo function is set to Motor (like it should be) none of the motors spin when I use the RC transmitter.
Unless you’re saying that in order for the transmitter to work at all I need to fly it with Mission Planner alone, but you haven’t really spoken to my issue yet and I haven’t seen anyone with the same issue anywhere on the internet, hence my post here.
Can we talk on discord?
1 Like
I never use Discord. It’s been a long time. I have to dust off my login information. For the time being, I have another video to illustrate the problem.
I’ve tested with propellers on outside before. It didn’t change this issue, which I think is within the FC or the TX.

Yes, the RC sticks operate fine.
No, motor out should NOT move when you move the sticks. That is normal, expected and desired.
You need to be armed and flying for rcout to move.
Why aren’t your motors spinning when armed?
In the .param from earlier (if that’s still valid) MOT_SPIN_ARM is set to 0.1, meaning as soon as your drone is armed the motors should start spinning.
I know we’ve asked a lot already, but can you explain or show how you arm the drone?
How do you make it fly when you can’t control it with the controller? Am I meant to put it in the air with MP first, then try to connect my controller? If you know the steps I should be taking that I have not already taken and shown, please, let me know what they are.
I don’t know, Janno. As you can see, that works in RC3IN servo function, but not when servo function is set to Motor. I don’t know why.
Can you upload the .bin log file of this test?
If not, can you set LOG_DISARMED = 1 and do the test again? Maybe we see something in the log that’s causing trouble…
10 5-5-2024 6-12-12 PM.bin (621.6 KB)
Here you go.
Arming, I turn on my transmitter, then plug in a battery to my drone. I listen for the initialization beeps and lights, and wait for the servos to come online after pressing the safety switch. Normally, unless there’s some preflight check I missed, Mission Planner tells me I’m ready to fly.
So to be clear, you don’t hold throttle down and rudder right for ~5-6 seconds during “arming”?
Also the LED should be solid when the drone is armed, not blinking.
Be careful when setting MOT_SPIN_ARM = 0.2, that is dangerously high.
Depending on your MOT_THST_HOVER value that might be enough for the drone to lift off.
1 Like
I planned to adjust it down, I was just looking for movement to be triggered and to see if it was proportional to the inputs, like it should be. I just haven’t put them back to where they were yet because there are no props on it yet.
And when I do try to arm with the remote, it just beeps over and over and never does anything. Should I just stick with it? Throttle is down, rudder is at the bottom-right. Holding it to the right alone does nothing.
Could it also be that my motors are connected to the FC Main Out and not the RX directly? If I need to try to connect directly to the receiver, I’ll need to know what pins/channels to connect to.