Be careful when setting MOT_SPIN_ARM = 0.2, that is dangerously high.
Depending on your MOT_THST_HOVER value that might be enough for the drone to lift off.
1 Like
I planned to adjust it down, I was just looking for movement to be triggered and to see if it was proportional to the inputs, like it should be. I just haven’t put them back to where they were yet because there are no props on it yet.
And when I do try to arm with the remote, it just beeps over and over and never does anything. Should I just stick with it? Throttle is down, rudder is at the bottom-right. Holding it to the right alone does nothing.
Could it also be that my motors are connected to the FC Main Out and not the RX directly? If I need to try to connect directly to the receiver, I’ll need to know what pins/channels to connect to.
Sorry to say that, but “beeps and does nothing” sounds to me like a prearm error and that it doesn’t actually arm.
Is the log you posted with LOG_DISARMED = 1 or LOG_DISARMED = 0 ?
Motors connected to the FC is correct. If you connect them directly to the RC you won’t have any stabilisation whatsoever, so not good.
LOG_DISARM = 0. I’ll change it to 1 and run the test again shortly.
Here’s the .bin from just now after adjusting the LOG_DISARMED to 1.
You have the Poster Child Craft for a popular Hardware post.
Hardware to Avoid
LMAO! Figures… Got any suggestions, or did I just throw money away?
You should still be able to get it flying. The log looks like Motor Test ran correctly so set BRD_SAFETY_DEFLT, 0 and see if will arm. If not what does Mission Planner say is the problem?
Turns out the beeping I was hearing was just the “Locate Copter” alarm tone. Holding the rudder to the right as directed has no effect. The system doesn’t even recognize a command is being given. It sees the servo and RC signals, but it just isn’t DOING anything with them.

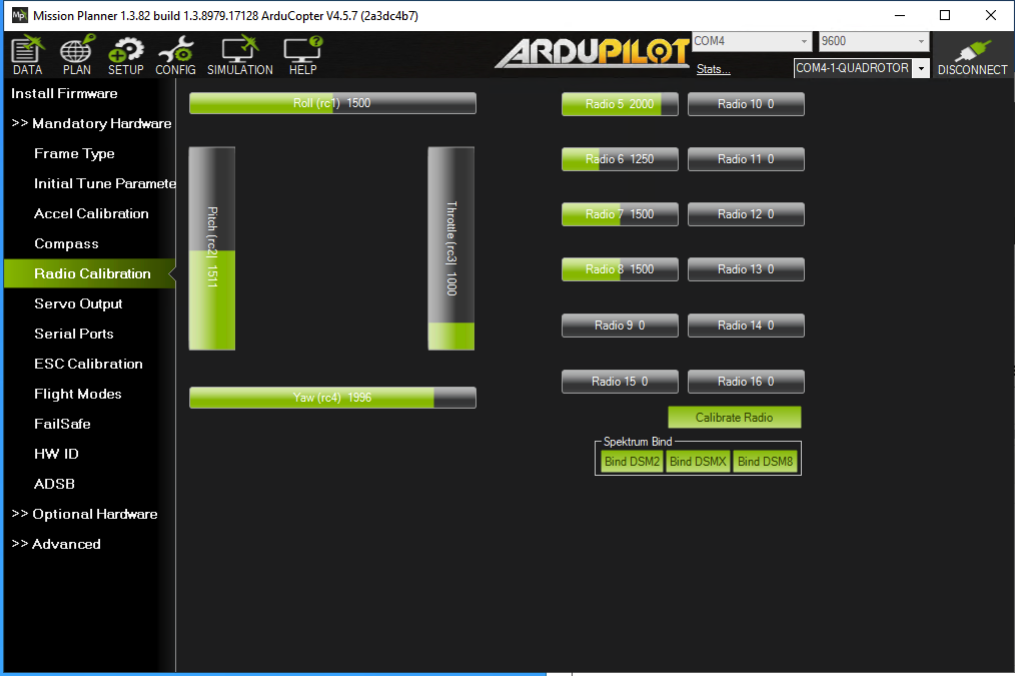
First of all, that was aileron that you held right, not rudder. Rudder is on the left stick. Second, it doesn’t work if throttle isn’t 0. The default arming command via RC transmitter is to hold the left stick to the bottom-right for ~5 seconds.
Third, what happened after you clicked “Arm” in the gcs is exactly what is supposed to happen. You arm the drone, the motors start spinning with MOT_SPIN_ARM rpm and if the drone doesn’t see further input for 10 seconds after clicking arm, it disarms again for safety reasons.
1 Like
You have the most basic stuff wrong here. You should have been looking at the Radio Calibration Screen while fumbling with the sticks to see what you are doing. When Arming it looks like this:
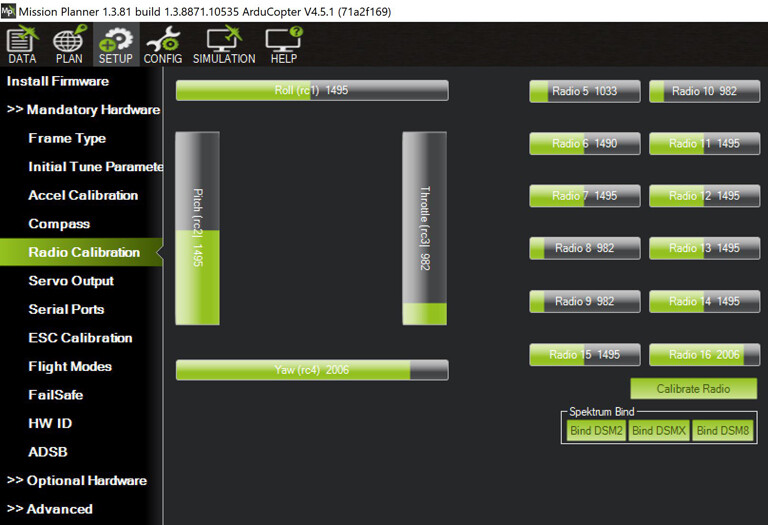
You’re right about the wrong stick. On my commercial drone, the Air 2S, I have the sticks set up so that right stick DOES control yaw, so I just got complacent. Good catch. It seems to be working now. Thank you for your help and patience.
1 Like
LOL Beginners gonna begin, my dude. There’s a ton of resources out there competing for validity and it’s easy to not know what you’re doing. That’s why this board exists. Feels bad to have your ignorance to something new harped on instead of helped, but I still appreciate everything. Janno got me hooked up.
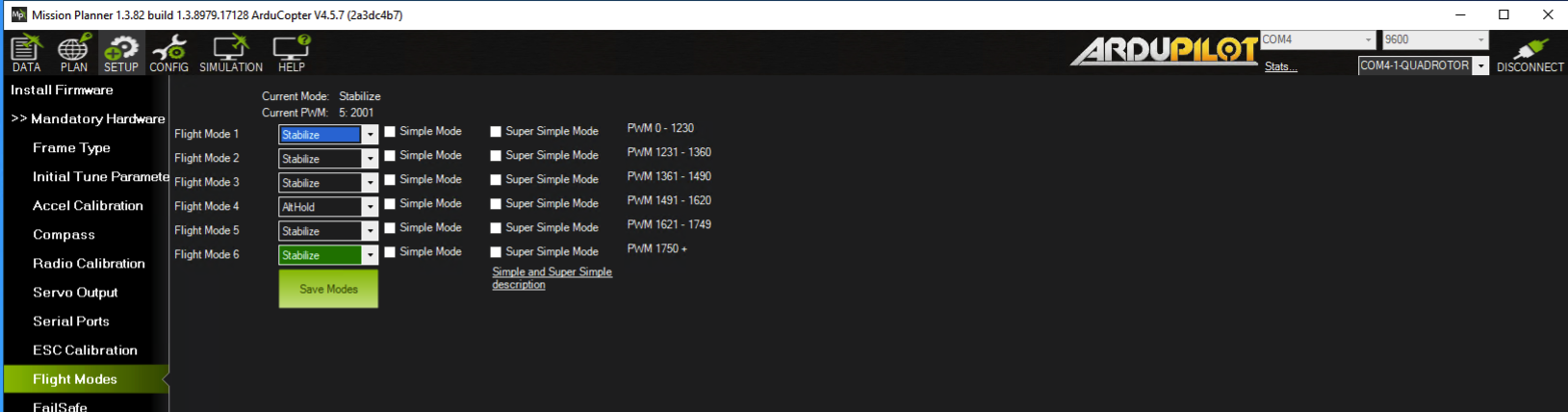
That’s Mode 3 or 4. If that Radio Supports it go for it if it suits.
Please do not do this keep the props off at all times until you get the bugs out… I think you need to get out of motor test then use the safe switch and rudder arm. Oh I see you got it working.
Hello there, I followed this discussion closely and I have the exact same issue. However, when I push the throttle down and to the right, I hear two beeps after 5 seconds which then repeat every second. The first tone is higher pitched than the other but both are low which sounds like some kind of error tone. After which the motors still will not run when the throttle is raised. So is there a problem arming?
I do see these messages if someone could explain if this is my issue with arming the motors:
11/2/2024 9:20:40 PM : Arm: LAND mode not armable
11/2/2024 9:20:38 PM : Arm: LAND mode not armable
11/2/2024 9:20:36 PM : Arm: LAND mode not armable
11/2/2024 9:20:34 PM : Arm: LAND mode not armable
you are in landing mode, you cannot arm in that mode. try stabilised mode.