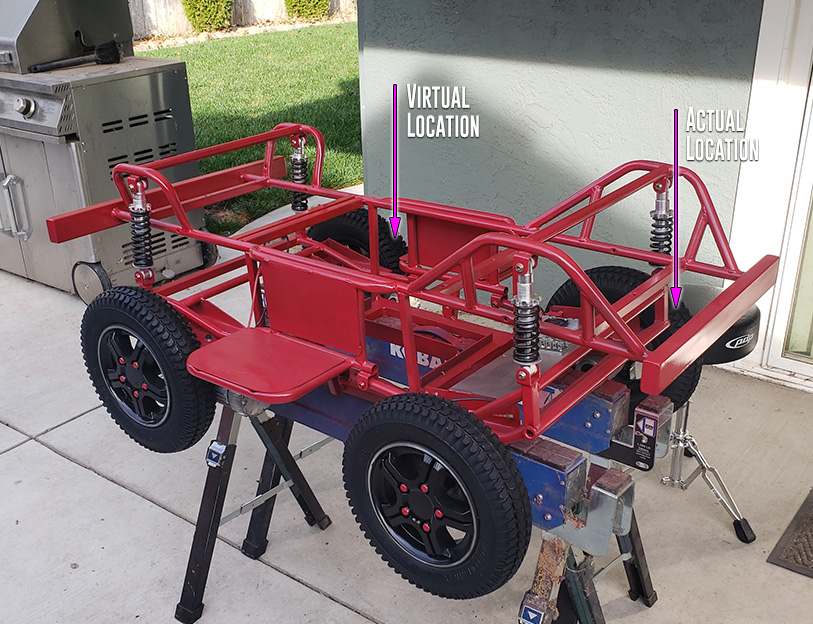
I have a very large rover that will need the IMU_POS1_X moved drastically. I will also have two (2) GPS units. Do I offset the GPS(s) to the virtual position or the actual position? Is the IMU position change factored into the calculation for the GPS?
The rules on ArduPilot are :
- IMU offset are relative to gravity center
- GPS offset are relative to IMU
3 Likes