Hello everyone!
Did anyone managed to get the wind speed from the anemometer cups using the RPM library?? If so, can you please send the wire connections and parameters??
Thank you!
Hello everyone!
Did anyone managed to get the wind speed from the anemometer cups using the RPM library?? If so, can you please send the wire connections and parameters??
Thank you!
Welcome, RPM sensors are defiantly working are you on 4.0, this is the wiki RPM instructions https://ardupilot.org/rover/docs/common-rpm.html
and the wind vane https://ardupilot.org/rover/docs/wind-vane-rpm.html
If you look higher in the thread there is some discussion of setup and wireing.
Hi @iampete, thanks for the quick answer!
Sorry, i forgot to give some context. I already followed the discussion and also read both pages but still cant make it work. I noticed that @patmo141 gave up on trying to use this sensor and @karla changed to the NMEA anemometer. Thats why i was looking for specific wiring and parameters from someone that did make it work. And also i want to update the wiki page with more details about the wiring with images and schematics…
I believe my parameter setting for the RPM and WNDV are ok. Im getting a response from rmp1 when connecting/disconnecting the digital pin. But im getting some weird behavior from the rpm1 value, and its probably the wiring.
First, when nothing is connected to pin 54 (im using RPM_PIN 54) rpm1 returns a low value. If i connect just a loose jumper to pin 54 then rpm1 value goes to max and wind_speed also goes to max. Now if i connect this jumper to ground or 5v then rmp1 goes to zero, but wind_speed stays at max value. And lastly if i disconnect the jumper from ground or 5v and touch the jumper contact with my finger the rmp1 value goes up (max+offset) and wind_speed follows. If i release the jumper rmp1 goes to max again and wind_speed follows.
So, by this behavior it seems that wind_speed only follows (is changed by) rpm1 when rmp1 goes above this max value. Im not using the anemometer at this moment, im testing with a simple button, but technically is the same, just a way to open/close a circuit.
Try with RPM_MIN = 0 and RPM_MAX = 0. This should disable any Range checking. You should then see the RPM reported back as RPM1 over mavlink
Hey David,
I had it working with a dry run, set up with aligator clips and some very crude “twists” and then when I soldered it together it was not working. I’m sure I overlooked something. I just ran out of energy/time.
Regarding your test. The ADC on that pin is looking for a rate of opening/closing not just opened/closed. So your test is going to give it really strange results if it gets one spike or one drop. That’s why you are getting weird results when just opening/closing the jumper.
I’ll see if I can dig up the settings/wiring I had. A 10k ohm pull down resistor did do the trick when it was working. If you PM me an address I can mail you a few since I had to order a whole assortment from amazon 
Hey guys, thanks for the support!
I managed to make it work, finally  . You are correct @patmo141, the value of rmp1 only made sense when i connected the anemometer…
. You are correct @patmo141, the value of rmp1 only made sense when i connected the anemometer…
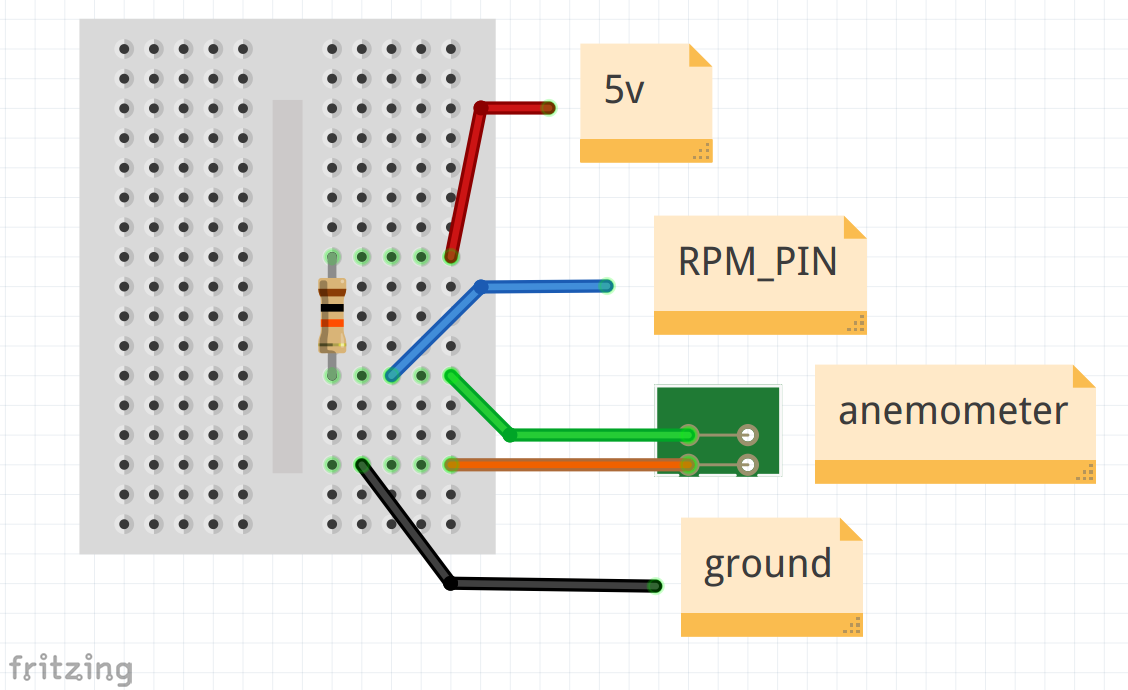
The wiring is as follows:
the 5v and ground can be from any source (but both from the same source). it could be from the aux trails, if you connect an esc and battery or you can take directly from the pixhawk.
as for the parameters, it wasnt working because RPM_MIN and RPM_MIN_QUAL were too high for our application, so it would only work for high wind speeds
The parameters are:
BRD_PWM_COUNT,4
RELAY_PIN,-1
RELAY_PIN2,-1
RELAY_PIN3,-1
RELAY_PIN4,-1
RELAY_PIN5,-1
RELAY_PIN6,-1
WNDVN_SPEED_FILT,0.5
WNDVN_SPEED_MIN,0
WNDVN_SPEED_OFS,1.346
WNDVN_SPEED_PIN,14
WNDVN_SPEED_TYPE,3
WNDVN_TYPE,3
RPM_MAX,10000
RPM_MIN,0
RPM_MIN_QUAL,0.1
RPM_PIN,54
RPM_SCALING,0.011119
RPM_TYPE,2
again, many thanks for the support!
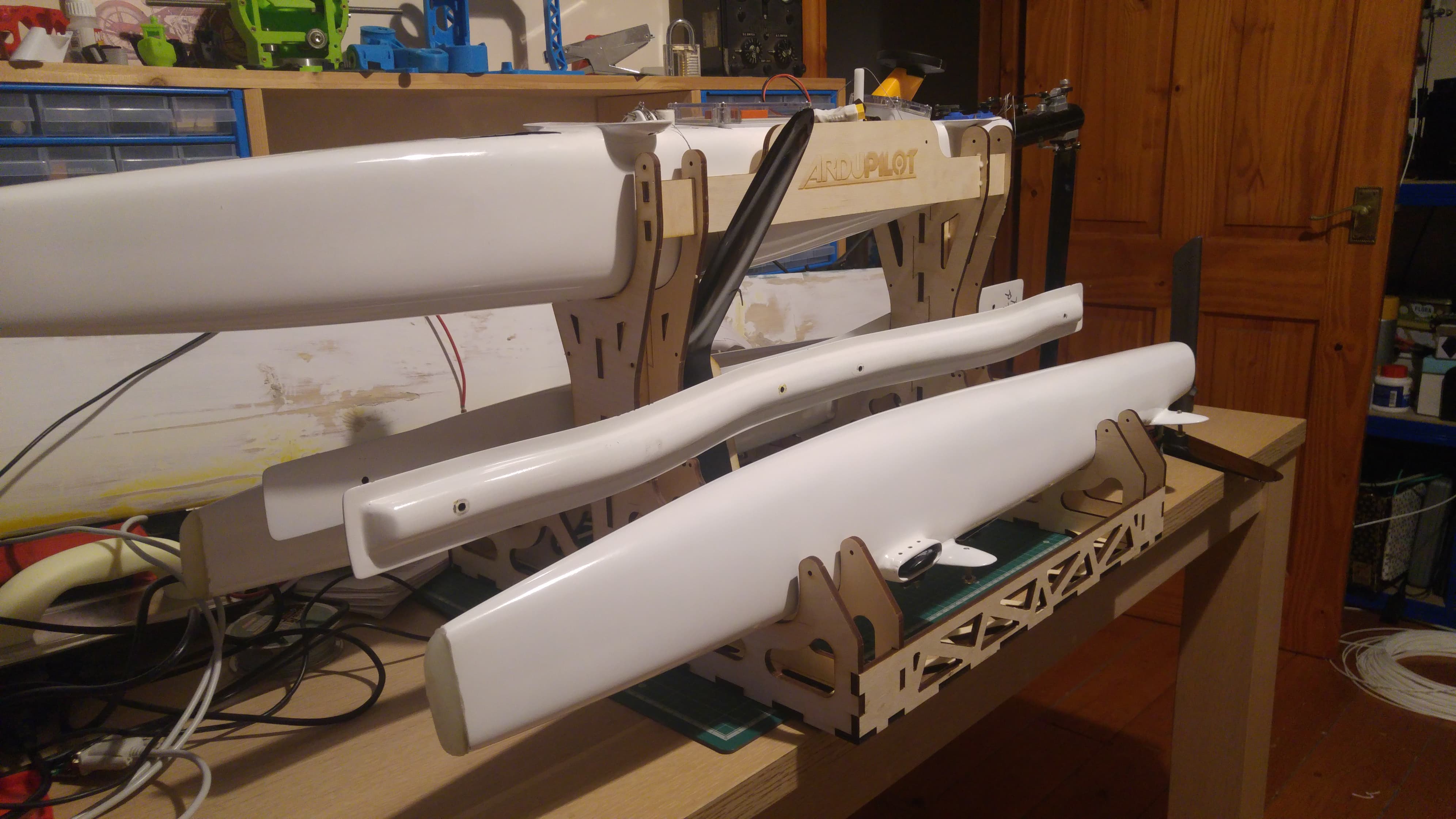
Another quick mini40 update. I have made a stand to transport the boat in bits, the hull it to big to go in my car when its together. Still need to add some padding and straps to hold everything in but hopefully this will make it much quicker and safer to transport and setup. Auto pilot installation is coming along, done most of the internal wiring and fitted the GPS and telemetry modem. I still have to make up some coax extensions and seal it all up. Not sure what i’m going to do for a wind vane yet, hoping to come up with some system that allows it to be easily transferred between rigs. Aiming for a first sail without the wind vane at some point before the new year.
Looks very neat!
Lucky you can sail during winter. I have to wait until march I think.
The plan it to use some silicone sealant of some sort although I might use hot glue for the first few test until i’m sure i wont need to change anything. My IOM is sealed with hot glue and it only leaks abit.
Another quick mini40 progress update, Cube Orange, Here2 (Thanks Hex!) and the RFD868x are all wired up and tested. Mainsheet rudder and elevator servos all working. Before first test I still need to wire up the servos in the outer hulls and seal everything up. Getting quite close now. Before a proper first sail I also need to sort out a wind vane of some sort. Tempted to cannibalise the one off the IOM, the deck is falling off and the rudder is loose, so it needs a over haul in any-case before I can use it again.
I know the feeling, but I think you don’t need to cannibalise, I built a connector for the wiring for the NMEA unit and a mounting socket that is detachable so it can be moved for transportation and between boats. Not with the boat now for a picture.
Elevator servos?
The rudder foil angle of attack servo, I have been calling it elevator because I borrowed planes elevator output name in the code.
And you will have other servos to control the foil angle on each outer hull right? So they will be controlled independently?
yep, that is the plan
I have a standard Calypso Wind-sensor (without Bluetooth) that I am trying to connect to a pixracer with ardupilot rover (no sailboat configuration).
Unfortunately I can not make it work. I checked the Calypso and it is correctly giving readings when connected with a USB-RS485 Converter.
As described in the wiki I have a max3232 board from sparkfun and connected as follows:
Calypso -> max3232
white-NMEA-OUT+ -> R1In
brown NMEA-OUT- -> GND
max3232 -> Pixracer-Telm2
R1Out -> RX(IN)
3V-5.5V -> VCC +5V
GND -> GND
Calypso -> 12V Battery
PINK VCC+ -> 12V +
Grey GND -> GND
ardupilot Settings:
%%%%%%%%%
SERIAL2_BAUD 4
SERIAL2_OPTIONS 0
SERIAL2_PROTOCOL 21
WNDVN_DIR_PIN 11 Pixracer
WNDVN_SPEED_PIN 11 Pixracer
WNDVN_SPEED_TYPE 4
WNDVN_TYPE 4
WNDVN_SPEED_OFS 0
WNDVN_DIR_OFS 0
Any help what I may missing is very much appreciated
Mat
hum, that all seems correct. A nice way to debug is to use the serial passthrough. You can pass serial port 2 out of serial 0 and you should see the same data you got over your USB-RS485 Converter. I found that I had to set serial 0 to the same baud rate as the windvane ie 4.
https://ardupilot.org/rover/docs/common-serial-passthrough.html
Your on Rover 4.0? (or newer)
Am on rover 4.0 at the moment
All working, I had the stupid misstake of having Telemetry Rates for Sensors set to 0 to reduce communication load:rofl:
Had the mini40 on the water for the first time this weekend. Working OK so far, here is a quick vid of some loitering. Not much wind unfortunately did manage a test of auto but it was all very boring even with the big rig.
Did do a bit of foiling with a motor instead of the sails, it got up and going fairly quick after some triming. Need to spend some more time motoring to get the steering controller dialled in. I found the rudder gets speed wobbles if you go to fast. To much happening to get any pics, sorry!
Nice. Your season started early.
Where and how did you mount the motor?