yeah that happens sometimes, often with fresh eyes you can spot the mistake. If you post some pics we can take a look. What are the symptoms?
symptoms are sadness, frustration, feeling of disappointment…Oh, the pixhawk…just a solid 0 reading all the time on the wind speed. All I did was go to sleep, wake up the next day and solder together the setup I had tested with twist wires. I’ll have another crack at it next week because as much as I want to record data while sailing, my real priority is actually sailing 
3 Likes
Hi Peter
I would like to add a calypso wind sensor on my boat (not a sailing boat) to monitor wind speed and direction. Would it be possible to have the Wind vane supported for Rover boat too?
Thanks
Hi Mattias,
Wind vanes are supported for all rovers, just set the enble parameter. You will get the wind speed reoprted to your gcs over mavlink. However logging to SD card is only enabled for sailboats currently. This is a very easy fix tho.
More Wing sail configuration stuff:
Finally got a day with enough wind here at a time I could sneak away to park 
Its been gusty from 3 to 8+ knots with shifting wind directions unfortunately, but still got some readings i wanted.

As a step to learn how to sail the Wing on my rc laser I want to find out what will be the resulting change of the wing if I change the flap 1 degree.
The flap is set up to do max -43 to +43 degree deflection from zero degrees.
So I made several tries of changing the flap and read what the resulting change of the wing, using a home made scale.
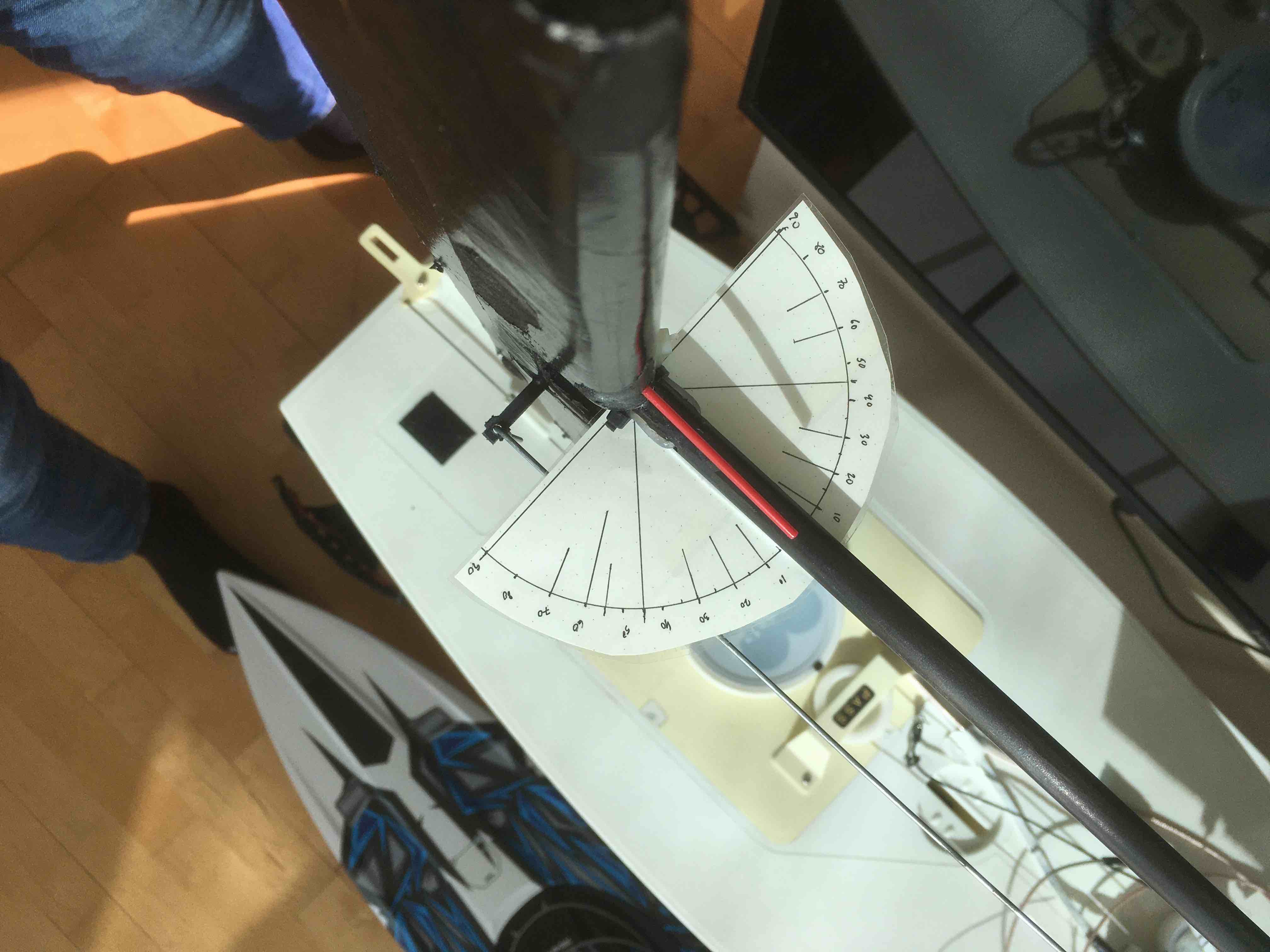
Then checking the resulting degree change of the wing.

These are my findings after running average outcome of 10 tries:
-
Ratio of Flap to Wing = 0.9 (move flap 1 deg CW and wing will move 0.9 deg CCW)
-

The conditions for tomorrow Saturday is also pretty good, so I will try to sail it!
However, at this point I am really not sure what this mean, some of my questions
- I am used to main sail 90 degrees to boat, but now I am limited to ˜40 - what does it mean?
- I really have no clue as to what is the ideal sail angle to the wing.
- If I even knew that angle, then I am not really sure how to accomplish it.
I don’t expect anyone to help me here, not many sailing laser with wing sails around I assume, just want to share my thoughts…
2 Likes
great! I have actually done the wing sail code.
I can build it for you, what flight controller are you using? This code just puts the flap at either max or min depending on the tack. It then moves it back to towards the centre as the boat tips over. I’m not really sure if this is the best method but we can always improve it.
1 Like
Holy, you are fast
Well, I think I need more explanation on how this should set up to work ( really sorry )
my plan for tomorrow is just to sail with Acro mode that will basically keep the steering cource straight and not tamper with the sail since there is none 
Then try to learn what happens when I sail back and forth with speed etc
I will manually do the adjustment of the Flap angle.
Take your time and do the proper development and documentation.
I will help you in anyway I can
best
K
Sorry I did not answer your question.
The flight controller is Kakute F7 AIO.
and of course I will try it out if you build it
Weather forecast looks promising the upcoming days.
Cool to start minimalistic.
I was just assuming you would, like the code for soft sails, use the " ideal sail angle to the wind" strive to have the Wing sail pointing there, using the flap. Flap at zero= wing points to wind, Flap max and Flap min together with a flap-to-wing ratio will allow to control it?
What logic do you use to “move it back towards centre as the boat tips over”?
This is the wing sail testing code for KakuteF7 ardurover.apj (712.4 KB)
Its Master + https://github.com/ArduPilot/ardupilot/pull/12432
You have a new servo function for the ‘wing sail elevator’ - 128. You just need to set the trim position so it gives no lift, ie inline with the main wing. You may have to reverse the servo so that it tries to sail forwards not backwards.
1 Like
Cool!
Will try it out.
Meanwhile, last weekend I got some two full hours of wing sailing.
Just using acro mode for rudder and sailing back and forth while trying out flap angles.
. I think its working pretty well but is different to soft sails. You can not tell where the wind is coming from just by just looking at the sail.
. it has potential for decent boat speed I think but often the speed is less than the wind speed should suggest it to be.
. At the end of the video there are some gusts up to 10 knots, that are interesting.
3 Likes
I probably misunderstand how to do this, but I flashed the .apj file on to the Kakute board and then want to set
SERVO2_FUNCTION to 128 since my wing tab servo is soldered on to the second servo output on the board. But there is no option 128 in the list, the highest number is 109 Script 16.
Because this is new stuff the descriptions in MP don’t get updated. You have to use the full parameter list/tree and manually set the value to 128.
Sure, I understand and used the Full parameter list.
Still, no reference of 128.
I can eat that no problem.
But setting it to 128 it does not move the servo in manual mode or in Acro mode.
You have the similar Kakute board - what servo did you assign that worked for you?
I really like to get this going today since there is some wind tomorrow but not later in the week.
That sounds like the motor ordering issue on the F7, easiest thing to do is just set all the outputs to 128 then turn them off till it stops working.
For “motoring ordering issue” I, don’t think so.
I have tried and confirmed all 1,2,3,4,5, and 6 outputs are properly configured and responsive, taking in to account the boards mismatch in their manual.
Got it covered.
Please confirm to me that the setting 128 will not be in the list of proper settings for any SERVOXX settings, at the moment.
right?
Yeah it will NOT be in the list, possibly there is a bug in the code I haven’t tested it IRL although I have had a quick scan through today and it looks OK. It should do follow the stick in manual mode as the normal main sail winch output (89) does.
got it and I will try it
thanks
This is really strange. I set the function to 128 and write parameters is OK. Then reboot board and the setting has now been changed to 127.
I have tried both with SERVO2_ and SERVO6_ but the result is the same.
When I set them to 0, disabled, then they stayed disabled after reboot.
What can I do wrong?
This is totally my fault. It turns out were overflowing the parameter. The servo function parameter is a int8 so can only hold values between from -128 to 127.
I have compiled this test version with the wing sail output set to 124. ardurover.apj (704.4 KB)
We will have to fix the issue for it to get into master but its fine to overwrite something else for testing.