I had this in my dev version, it was useful for setup, I will add it in again. We now have a SAIL_ENABLE param that hides all our sailboat params for most users, this means we can add more specialist parameters back in.
Hi all, this is a bit of a update on the GSoC project.
I have done a fair bit of work on restructuring of code so far. The first task was to move the Sailboat functionality to its own class within the code. This means there is now a SAIL_ENABLE parameter, you have to enable sailboat before the rest of the parameters will show up. This gives us a bit more freedom to add parameters without giving the normal rover users loads of stuff they don’t need. The second change was to split up the wind vane library. This split gives a generic back-end template that will make adding more sensor types much easier in the future. There should (hopefully) be no functionality changes from these code improvements.
The new wind vane library allowed me to implement a driver for NMEA wind vanes. I have tested it with Calypso wired ultrasonic unit although any NMEA 0183 units using the MWV message should also work. I have just finished mounting it to my testing boat. This will he a huge improvement over the potentiometer wind vane I was using previously.

I have also spent some time adding support for ‘motor sailing’. That is a sailboat with both a motor and sail. The code will decide whether or not it should use the motor based on a wind speed threshold. I have also added a three possision switch RC_OPTION. This allows the user to select 1. never use motor, 2. motor enabled (ie the code decides) 3. force motor. This give the ability to do a standard rover loiter for example. To test this I plan to fit a air propeller to the back of the boat with a BL_Heli ESC that supports reversing. Not the most elegant of solutions but much easier than retro fitting a water propeller.
The code tidy ups have already made it into master so can be tested here. If anyone fancy’s testing NMEA wind vanes and/or the motor sailing functionality I can build custom firmware. Hope fully that will also make it into master over the next week or two. I should give the standard disclaimer about using none-stable release code, might do funny stuff and behave in unexpected ways ect…
The next job is wing sails, like this, does anyone have one? I don’t have and hardware to test with, and havent been able to find anywhere you can buy them. (I would quite like to build one but its not Google Summer of Building Hardware unfortunately, but we will see how we go)
2 Likes
Wow you have really been busy 
I am really interested in the calypso wind vane. How many, and what kind of pins does the cables connect to on the controller? Two analog pins?
For the wing sail, I will see if I can find something available that can fit a Laser.
Keep it up!
Hello Laser users ![]()
What is that sticking down in the water from front and aft bleu bars?
Its some foils?
You plan to foil the laser?
Just curious and have been thinking myself about optional ways to foil my laser.
NMEA uses a serial port, also you need a logic level shifter. This is how its hooked up to my test board:

Ah I think this is goos news, since I can have one of my dear analog pins back.
What autopilot board is that?
Do we need a logic level shifter because the wind instrument is operating at 6-28V and the autopilot at 5V? Is that really needed if using the very similar product but is operating at 5-24V? https://calypsoinstruments.com/shop/product/ultrasonic-wired-ble-9
its a Kakute F7 aio
You will still need the shiftier, they use the RS422 / RS485 standard this specs signal levels between -7v and +12v. I am using this max3232 board from sparkfun.
1 Like
I’ve been threatening to build a boat with a hard sail just have not had time.
1 Like
Been doing some research and can’t find any ready to buy on the usual hobby stores and ecommerce platforms, amazon, eBay, BG, Aliexpress, HK. So I think hoping to buy something is not an option.
However, there are lots of DIY projects describing how to build wing profiles on Youtube. Most interesting I found so far is flitetest.com that are using special water resistant foam boards to build all sorts of fixed-wing rc models.
Here is one video example showing several tips on how to use it to make different profile shapes.
I think it should not be too difficult to build a wing sail if using foam board material and a very simple construction design like the KF airfoil design.
I am tempted to try it, It would allow a design with a fixed mast, not moving with the boom, so the new accurate wind instrument can be mounted at top of mast.
There seem to be two types of wing sails out there.
The one you have in the example @iampete with a trim tab separated from the wing and another one with the trim tab attached directly to the wing. The latter kind seems very effective and the one of choice for speed record chasers?.
I don’t know if they work the same way?
If not, maybe not support for both kinds?
Edit: B t w I found another bachelor thesis, developing the ‘control flap’ for that boat.
1 Like
The type I am interested in is the tab separated from the wing. The tab is used to ‘sheet’ the ‘sail’ in and out. Because the sheeting is done by the wind the sail automatically adjusts itself to the wind direction, this saves a lot effort constantly sheeting in and out as the wind changes. The type with the tab attached to the wing are just a more efficient sail and still require a main sheet.
I have done a fair bit of messing about with the flight test waterproof foam board, must say i’m not that impressed by it. The waterproofing makes it feel sort of waxy, glue and tape does not stick that well and the paper seems to separate from the foam easier than standard white foam board.
The RC laser is a ideal choice for a wing sail project as there are no stays to get in the way of the sail rotating all the way round. You would need to limit it some where tho as you have to get the wire to the servo in the wing to actuate the trim tab.
The Laser would probably be a good boat to test the code however it will be extremely tender in the water. I have thought, and continue to, about building a dedicated hard wing elevator boat. Probably 1/2 the scale of the referenced boat in @karla. It needs to fit in my car. 2 Meters. And of course it would need some type of stoppers on the sail to keep wires from getting all wound up. Now that the code is expanding to this type of sail I may start exploring it with more vigor!!
2 Likes
I have got the ultrasonic sensor hooked up. Also added a antenna for telem and receiver up the mast, hopefully getting above the water will give quite a range boost. Should certainly be better than the wifi telem I was using last year.

Got a motor fitted to the boat also, ready for some motor sailing.

Deck is much cleaner without the windvane at the front. I have completed the switch from pixhawk lite to kakute f7. Hopefully I will be able to do some testing this week.
4 Likes
Oh great to have all that sorted out, thanks @iampete.
Agree with you @David_Boulanger a rc laser is too weak for the open sea, but great at ponds and lakes around where I live most of the year. Building a 2m scaled down R boat (I think thats what they are called?) would be so nice. Then you could go on serious missions at sea.
@iampete, If i decide to build this wing sail and control tab, I need to understand how you anticipate to control it with the SW:
- How will the autopilot know what angle the Wing is at?
- How can you let most of the action of the control tab be automatic/self balancing but at the same time controlled by a servo. Would not any connected servo fix its position/angle and obstruct its free movement to auto balance the angle of the Wing?
Furher, does any servo really need to be up on the wing or control tab, or could it be under deck? What sensors do you see needed up on the wing/control tab?
it wont, the code assumes with the trim tab in a neutral position the wing will be pointed into the wind with no lift.
the servo deflects the trim tab, so one way will provide lift in one direction and the other way will provide lift in the other direction.
probibly need to be in wing.
Think of a plane with one tip mounted on the deck, the trim tab is the elevator
Aha, okay, I got it.
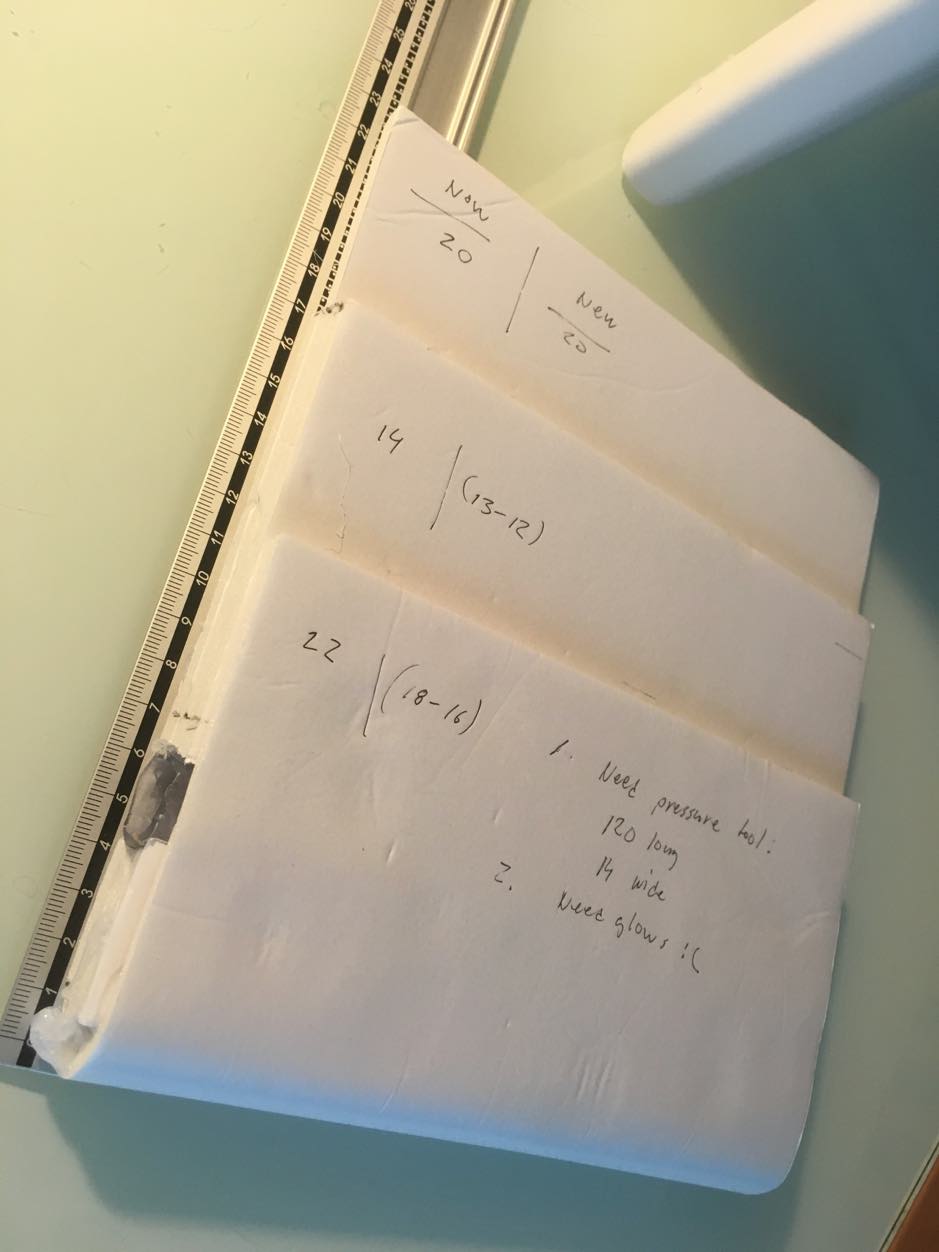
Sharing some wing experiments with material, design and builds.
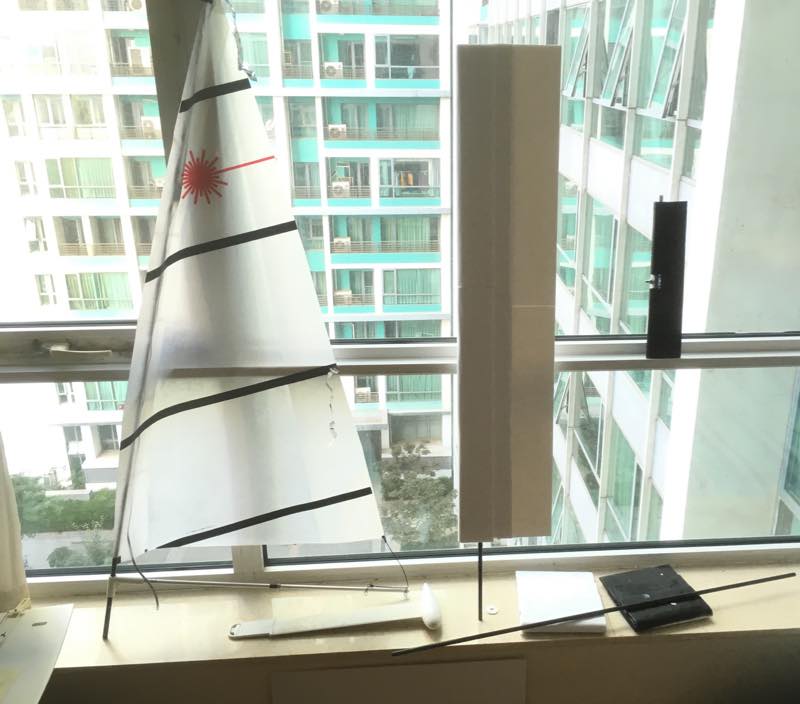
The Laser has ~950 sq.inches of sail per default (~2400 cm2). Keeping that same area and using the proportions from the reference boat in earlier post, then height will be 110cm and width 22cm using the aspect ration ~5:1.
The area of the trim tab should be ~12% of wing area and using same 5:1 aspect ratio gives height of 37cm, width 7cm. The control flap will have a lever arm with a length of 50% the wing span, so 110/2 = 55cm.
The wing profile will be a symmetrical airfoil, and trying to build it close to dimensions of NACA 0018 (nice and fat max thickness 18% at 30% chord) but I am just using a simple step design with no smooth curves, like Kline-Fogelman style.
I have also assumed the aerodynamic center of pressure will be at 25% of chord and will place rotation axes there (mast).

I have not used the water resistant foam board discussed previously but a 0.5mm think more simple one, coated with paper and thin plastic layer. The surface needs to be painted to protect from sun and water and paint seem to stick and stay on the surface and also keep water away. However, time will tell if it will fall a part or not. Good enough for now I think.
I made two Wing prototypes with the length of only 20cm not the full 110, to figure out how to use the hot glue etc etc. Both were designed to have a mast fixed to the boat and not turning as the Wing turns. Reason is to be able to mount the new wind instrument at mast top not at front deck. The mast is a 10mm diameter and 1mm think carbon fiber tube (same dimension as Laser default).
The first one has a PVC-U tube glued inside the wing with an inner diameter of 15mm. The idea is to have the fixed mast move inside the PVC tube using 3-5 bearings so the wing can turn without any binding.
However, having completed that I found it a bit heavy.
So I decided to make another one without any tubing. Idea is to drill a long hole for the mast after the wing is made. It could maybe work as good as the first one. The PVC tube will increases the weight ~80% and if completed the wing would weigh 0.55kg compared to 0.3kg without.
I am not sure I trust myself drilling a 110cm long hole in that wing. It seems hard to keep a straight angle for such a long hole. Just when drilling the 37 cm hole in the trim tab, it did not turn out straight. It was just barely acceptable.
So I ended up with the Wing in the first picture - that mast is glued in to the wing and is fixed there. It will not work to mount the wind instrument in mast top.
Maybe it can work as plan B if the other two wing designs fails.

I spend some time thinking how to design and attach the trim/control flap to the wing, with two rods or will one be enough? I decided to first try make it with one and if it fails then use two. For the mounting I came up with making a little housing with the PVC tube, just 3cm long, for two bearings. A carbon fiber tube running through the leading edge of the trim flap will then move inside the bearings without binding.

{kind=link}
The housing will then be attached to just one rod that will be fixed to the Wing.
Thats next.
Also need attach a servo and a weight balance so the whole rig will be neutral.
2 Likes
looks really good!, I’m excited to see how it works
Latest bit of testing. NMEA wind vane works well, significantly better than my potentiomiter windvane. High mounted antennas have made big difference to the range, at-least double couldn’t test and further and still see where I was driving.
Motor sailing is working fairly well, switches nicely between motoring and sailing. Still one or two things to iron out, but should be useful for getting out of tight spots or if the wind drops.
3 Likes
Great to hear the new NMEA guy works noticeably better.
The motor mode seem giving great boat speed.
How do you control the thrust of motor? or maybe you don’t, just set it at some value and then on or off?