Hm yes, weight is important when sitting on mast top.
Mine is now 1.9 oz (55 gram) that’s a cup anemometer only. I can not sense a difference with or without it. But the sexy accurate one with wind vane, anemometer, solar power, thermometer, gyroscope, accelerometer and wireless is 4.8 oz (135 gram). Thats really a light weight unit, but would start to matter. 3 oz is only 85 gram.
I hope to be getting one of these to add support for.
https://calypsoinstruments.com/shop/product/ultrasonic-wired-standard-81
The more expensive ones have more sensors but the update rate is very slow for them. The gyro and accelerometer is 8hz, the ones on the flight controller run at up to 8khz (i think). So that is not all that useful. Temp sensor might be nice for logging i guess, but not a huge deal.
The wireless could be useful and that model has a better water proof rating but I think on the whole the wired version is the best for our application.
I will also try and get my hands on some mast head units for yacht. I think they are probably already supported with the cups anemometer and analogue voltage wind vane but it would be nice to document one for the wiki.
1 Like
After 3rd sailing I could not figure out why the Acro mode behaved so strange.
Then I notice that the wind vane works fine as long as the boat is not armed. But as soon as it is armed, the direction changes to something else and stays there, no matter how the wind vane is pointed.
As soon as disarming, the wind vane change back to correct value and is changing when moved around 
How can arming have anything to do with the wind vane?
Since it uses analog pin 11 that per default is used for Battery current sensor, I disabled the whole battery sensor. But that had no effect.
Any ideas?
hum, this is very strange, did you get the SD card setup in the end? if that working a data flash log would help diagnose, otherwise a tlog from mission planner.
Still struggling go get logs on the SD card. The unit is connected to the correct pins now and a suitable card formatted as recommended but there are so many LOG parameters to set I don’t understand yet. I have an arming check for Logging and that fails always.
Attached is a tlog file from today.
I armed and disarmed two times.
When disarmed the wind direction is around 2-4 degrees and when armed it moves to around 112 -116 degrees.
2019-05-19 11-34-34.tlog (477.8 KB)
looks like this is due to the inertial navigation system. Because you have no GPS fix it falls back to trying to calculate its velocity using its accelerometers. It only bothers to do this when is armed. If you look at the ground speed you will see it also jump.
Then because there is some ground speed and you have a wind speed sensor (although none of the speed prams showed up in the log for some reason) it does apparent wind calcs. The wind speed is reading zero so the wind direction changes a lot.
So if you have a GPS fix and/or some wind speed this effect would be very small. Because either the ground speed is correct with gps or the wind speed is much larger then the incorrect ground speed.
During the whole time of that log, the boat was on a stand indoors with no wind and no gps fix.
So, maybe I make some tests over at the lake to see what happens if there is a good gps fix and also some wind. Anything else to try?
I’d be very much interested in support for nmea0183 sensors. I have an airmar sitting around that would work great on a bigger sailboat, the one I have would probably be too small.
I think with some wind and gps lock the issue will be completely fixed
The ultrasonic sensor I am adding a driver for uses nmea0183, so my understanding is that if I can get that working then all nmea0183 sensors will work, so long as they do not use proprietary messages. (and even then if you have a sensor that we can find some documentation for and don’t mind doing a bit of testing I’m sure we could get it working)
1 Like
@iampete, regards to mount wind vanes at top of mast, I just realized that your sailboat has a fixed mast right? Thats unlike for example the Laser where the mast is moving around with the boom. Typically from 0 to 90 degrees measured from centerline off the boat. So, unless there is some clever code to handle this I will still need to mount the instrument on a fixed point most likely a pole on the front deck. For a wind foil profile, I think they will also move with the wind and have same problem. What do you think?
Your right, currently there is no way to compensate for the mast moving, the wind vane has to be fixed relative to the boat.
1 Like
I have the wind vain set up for testing! The readings have some error but I have not set the dead zone. In Mission Planner, when I set the CAL parameter to 1, I don’t get a pop up for the calibration procedure. I turned the vain for 30sec after setting the CAL flag thinking maybe it was leaning despite not seeing a pop-up. Any ideas?
We don’t get fancy popups, look in the messages tab on the main mission planner screen. If you reload the parameters you should see that the min and max voltage has been set.
I see, you are absolutely right. The wiki says “a message will appear” and I inferred pop-up. I saw that there were min max values but wasn’t observant enough before hand to know if they had changed.
Hi Pete,
We found that our wind direction issue was due to a bad gps signal (wind direction values were fluctuating when the gps was plugged in, but worked well when the gps was unplugged/had proper signal).
We are pleased to report that we were able to complete a few initial sailing tests in auto mode. Everything appeared to work well – the boat tacked as expected and sailed to all waypoints successfully. One issue we noticed was that when there was no strong wind, the wind vane direction would not adapt to light gusts, and the boat would not head in the right direction; however, the boat eventually found its way.
Attached are logs of two of our tests from that day. Looking at the logs, it appears as if there were some errors, possibly with the GPS signal. We were wondering whether this would interfere with the boat speed data we obtained from the tests.
Thank you for your help!
great! sounds like its working well, there is a low wind cut off parameter for the windvane, possibly this will help in very light winds.
GPS velocity errors can cause the wind vane issues, maybe I can do some more checks in the windvane library to try and reduce this.
Your logs didn’t make it.
Would be great to have some pics of your boat and windvane, and maybe a diagram of how the windvane is wired up for the wiki!
Okay we’ll be sure to take the GPS velocity into account and check the windvane library.
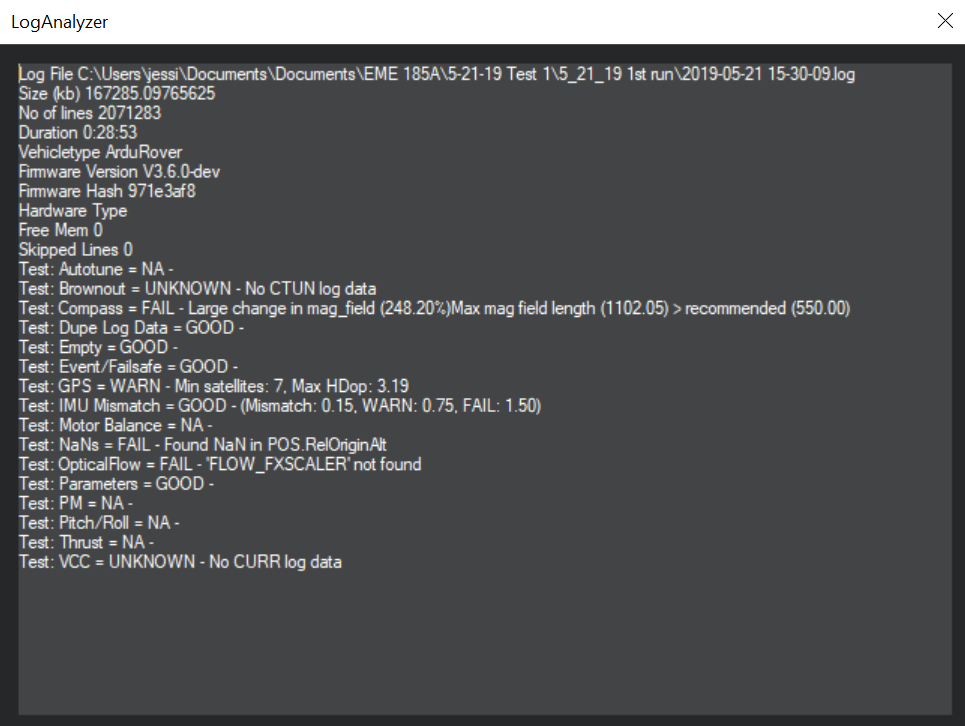
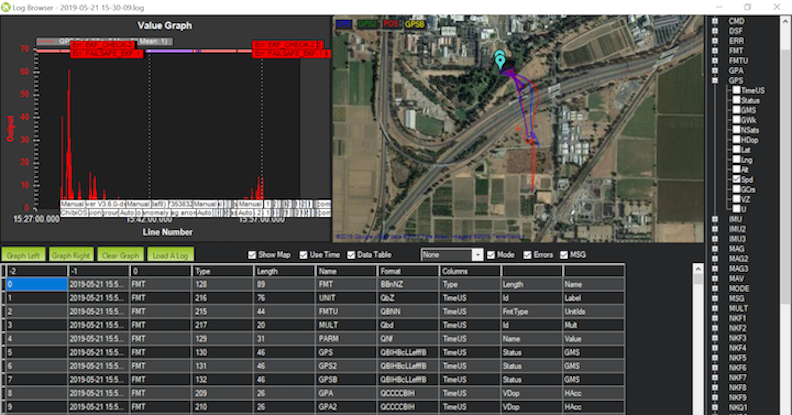
The log files won’t seem to attach to the forum, but here is a screenshot of the auto-analysis of our test. It looks like there are some errors/warnings with the GPS and compass. We are using a Here 2 GPS system with our Pixhawk Cube and it is stored within the cavity of the boat, beneath a watertight cap. Could this method of storing be interfering with our signal? The logs show that the signal bounced our location, such that the current positioning is not always accurate. We were able to filter these out in Google Earth, however. We were wondering if there is also a way to filter out the bad signal in our GPS speed data. A screenshot of this is attached as well.
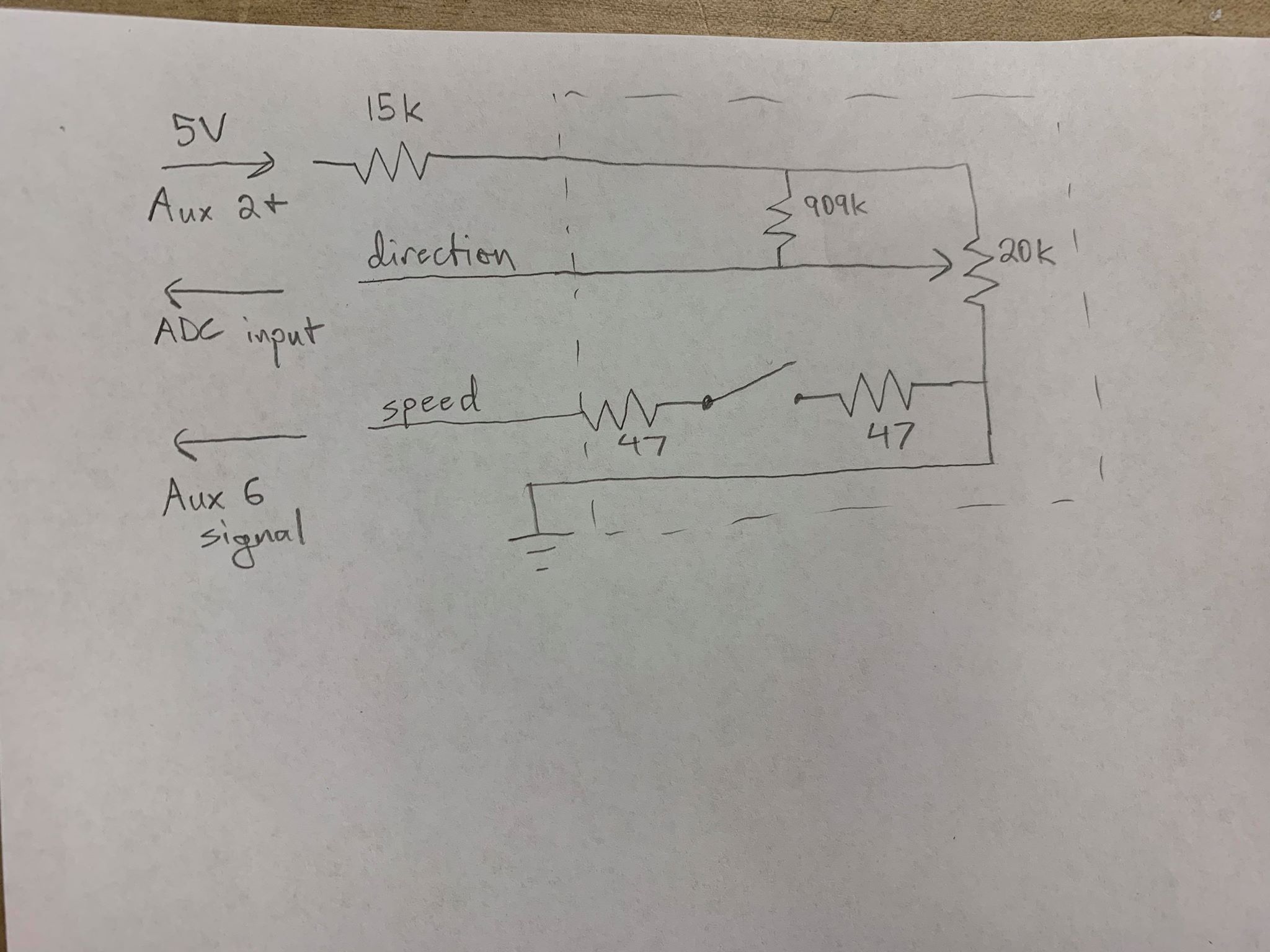
As for our setup, we are using a standard RC Laser sailboat and our anemometer (Davis anemometer) is attached with a 3D printed mount, as shown. A rough version of our wiring diagram is also attached.

The gps and compass dont seem happy. I have always found the Here2 to be very good. Maybe it does’t like being down in the hull. On my boat the gps is mounted at deck level. Also I wonder if the boom sweeping over is confusing the compass, although its not magnetic I guess.
GPS’s and compassed want to be as far way from metal stuff and power electronics (servos motors, telem ect) as possible. 10cm or so should be fine.
I’m building my test setup by just placing the flight controller, GPS, wind vane and anemometer on foam board.
-
Is there a way to display apparent wind angle in the quick display instead of the corrected absolute wind angle? I did not see it in the params list
-
My windvane seems to have 10 degrees of error, smoothly interpolated across the whole range. What I mean by that, is at 0 it has no error, at 90 degrees actual, it reads 80, at 180 it reads 173, 270 265 and by 360 the error is back to zero. Is this the kind of error that the high resistance pull down resistor will fix? Low pass filter? Dead zone? To me this seemed like a dead zone error in that it’s not starting to detect direction change until about 10 degrees of displacement however that did not seem to fix it.
OK, i answered my 2nd question. Sometimes writing the question helps. This is simply the dead zone. My vane has a 10 degree dead zone, that is from 0 to 10. So I needed to set dead zone and offset both at 10. Now my wind vane seems to have maybe 2 degree accuracy. Good enough for me! And since apparent wind will never be tighter than 10 degrees i’m not worried about it at all.