I would ask directly on the Quectel forum so that you can get the latest versions. If not, send me a PN
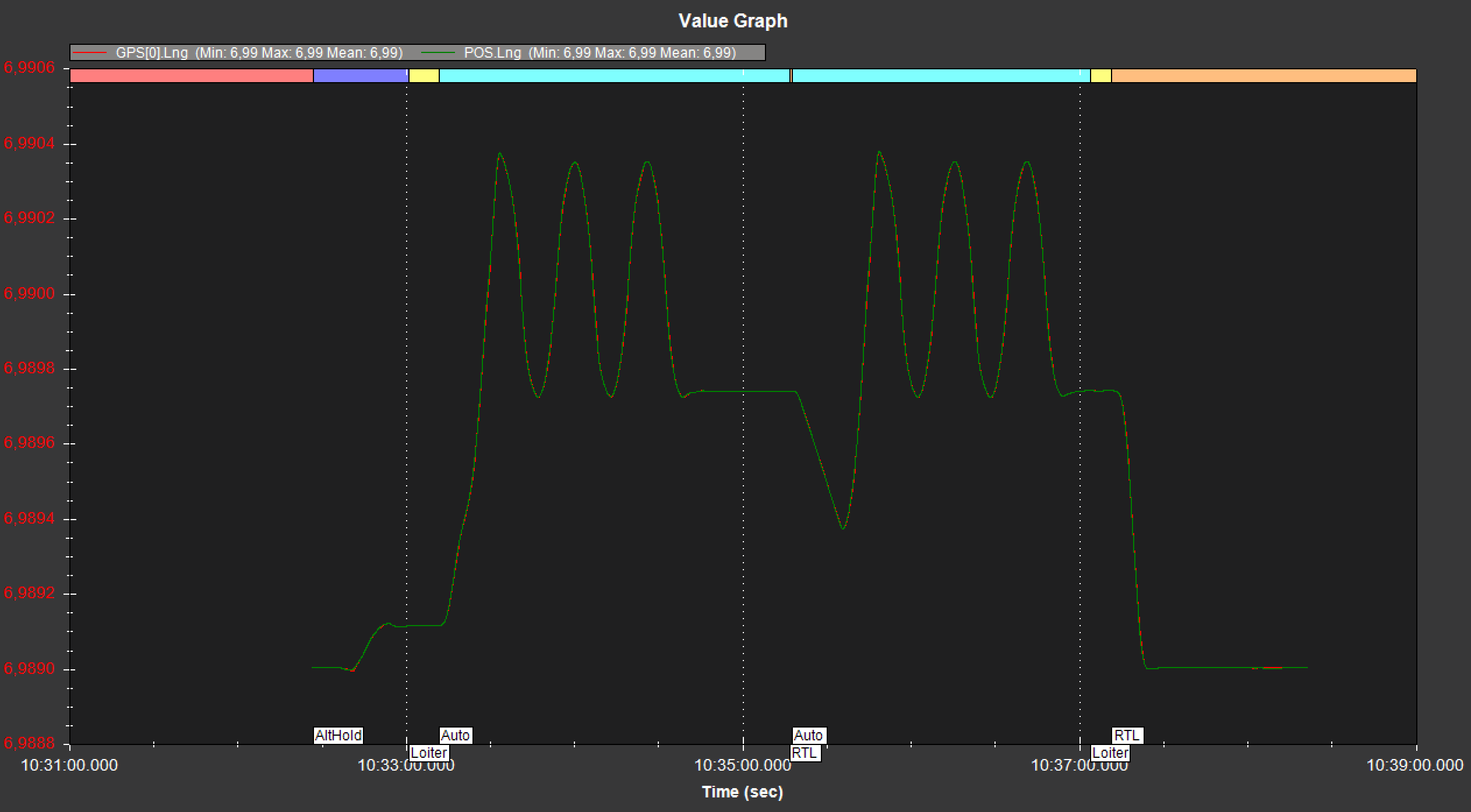
Yesterday and today I was able to compare the Quectel and the u-blox f9p mounted on the same copter (not at the same time, but at the same position). One of the things I wanted to check was how exactly the copter land back at the home point after triggering an RTL.
I didn’t even send the Quectel on its journey with the previous waypoints and saved myself the extensive time for film cutting after it touched down more than a metre away from the target point during the first “RTL” test.
The LC29HEA does not send hAcc messages, no variometer data, which I personally do not find optimal. I hope that I will soon have time (and weather conditions) to repeat the flights.
Just for comparison to that LC29HEA distance, with an F9P what would you normally expect that distance to be, and what is the max distance you have seen for an F9P?
You’re right, of course, that you can’t draw statistical conclusions from a single flight. I hope to have time to test the accuracy of the f9p with numerous repeated flights in the next few days and then do something similar with the Quectel. But I am already disappointed about the poor difference of more than 1 meter with the Quectel rtk-fix and only short flighttime, because that is the order of magnitude of inaccuracy I had in numerous flights in the past with simple M8N GPS: VTOL Spot landing by script
I’m setting up Ardurover for the first time. Inside at my desk. Having trouble. I have the Kakute H743 Wing. Connected with Holybro telemetry 915 radios at 56K baud to MP computer. Connection is good. Compass and GPS are on same Kakute connector and MP finds the compass. LC29 is stock. Uart 1 on kakute has been set to 460K baud. 5v and G wired. R-T and T-R between kakute and LC29. both LC29 switches pushed toward the usb connector (away from the antenna). MP does not appear to be able to see the LC29. In “preflight”, gps status is red. How can I tell what’s happening? Should MP be able to see the LC29 at 10hz? Gps antenna is inside and won’t see any satellites. Any Guidance?
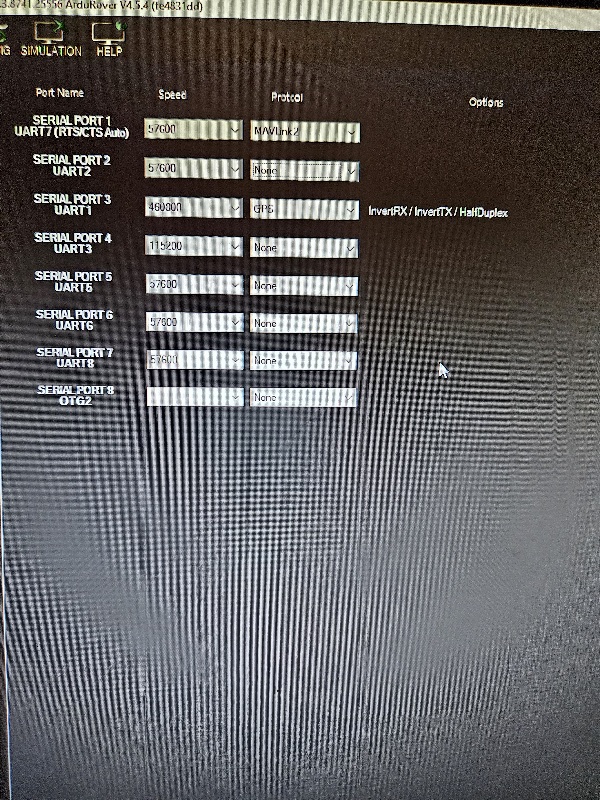
Connected via USB. HUD is “No GPS”. Tx-Rx wiring per photo, Using default GPS uart 1 on Kakute. Uart 1 set to 460K baud but has message “InvertRX/InvertTX/HalfDuplex” under options.
Yuri, Thanks for the help. Sorry I’m not crisper to get it set. Having someone like you available is SO valuable. I Set GPS_TYPE=5 and got “GPS: No Fix”, then it picked up satellites. Loaded QGNSS and put antenna outside and got lots of satellites–see photo. Moved antenna back indoors and still picking up 8 satellites. Pretty good!! I was going to install in rover and test as is, then go to 5hz later. However, since I’m all set up with QGNSS, I think I’ll just continue with 5hz. My intent is to follow your post of June 9, #154. Use your ini file in QGNSS with LC29 attached to computer via usb with both switches toward USB. Then execute the ini. Then put it back on the H743 and test again.
I done some quick testing with the gps outside, i could get RTK float and it was giving me values for pitch and yaw in the QGNSS application for moving baseline so next step is to load up yuris settings and leave it a bit longer to see if that helps get RTK fix and try it with a flight controller.
Yuri, I attempted to set the 5hz. Took your txt to ini. In QGNSS, connected LC29 via usb, switches to USB setting. HDOP was .7, view of sat sig strength showed 20 satellites. Did “command console”, Load, selected the ini, got 35 lines, clicked run. When the last line was red, hit “stop”. After running it, it took a while for HDOP to get back down to .7. No longer could see sat strengths in QGNSS; I assume because you have blocked that data for bandwidth. Moved GPS back to MP and injected NTRIP. HUD says 24 satellites with GPS antenna out the window. “GPS: 3D Fix”. Shouldn’t it say "RTK Fix or something similar? So what cockpit error am I making now?
Yuri, Thanks for the response. I’ll take a look tomorrow. Its standard state of Florida NTRIP data, so I may have set something wrong trying to grab it. Late Night update: I asked for “RTCM3” data in my request. That came down as mostly 1004 and 1012, considered “legacy” GPS and glonass L1 and L2 corrections, respectively. Your 1074, 1084 etc are MSM4 corrections. I apparently didn’t ask for those (since I didn’t really know what they were, I didn’t know to ask). I wonder if I should change my request to MSM4 from RTCM3? Looks to me like the data I requested is getting into MP, but not getting into the LC29, or at least not correcting the data, since the GPS status in HUD should have “RTK” in it if it were working right. RTK 3D, RTK float, or RTK Fix. Instead I’m just getting 3D fix. The 915mhz telemetry radios operate at 57K baud, so that concerns me as well, though I may just be worrying. You had helped be get access to Florida NTRIP data in another thread in May and I seem to remember discussions around MSM4 in that. I’ll look it up again in the morning (really later this morning). Here are the products Florida offers:
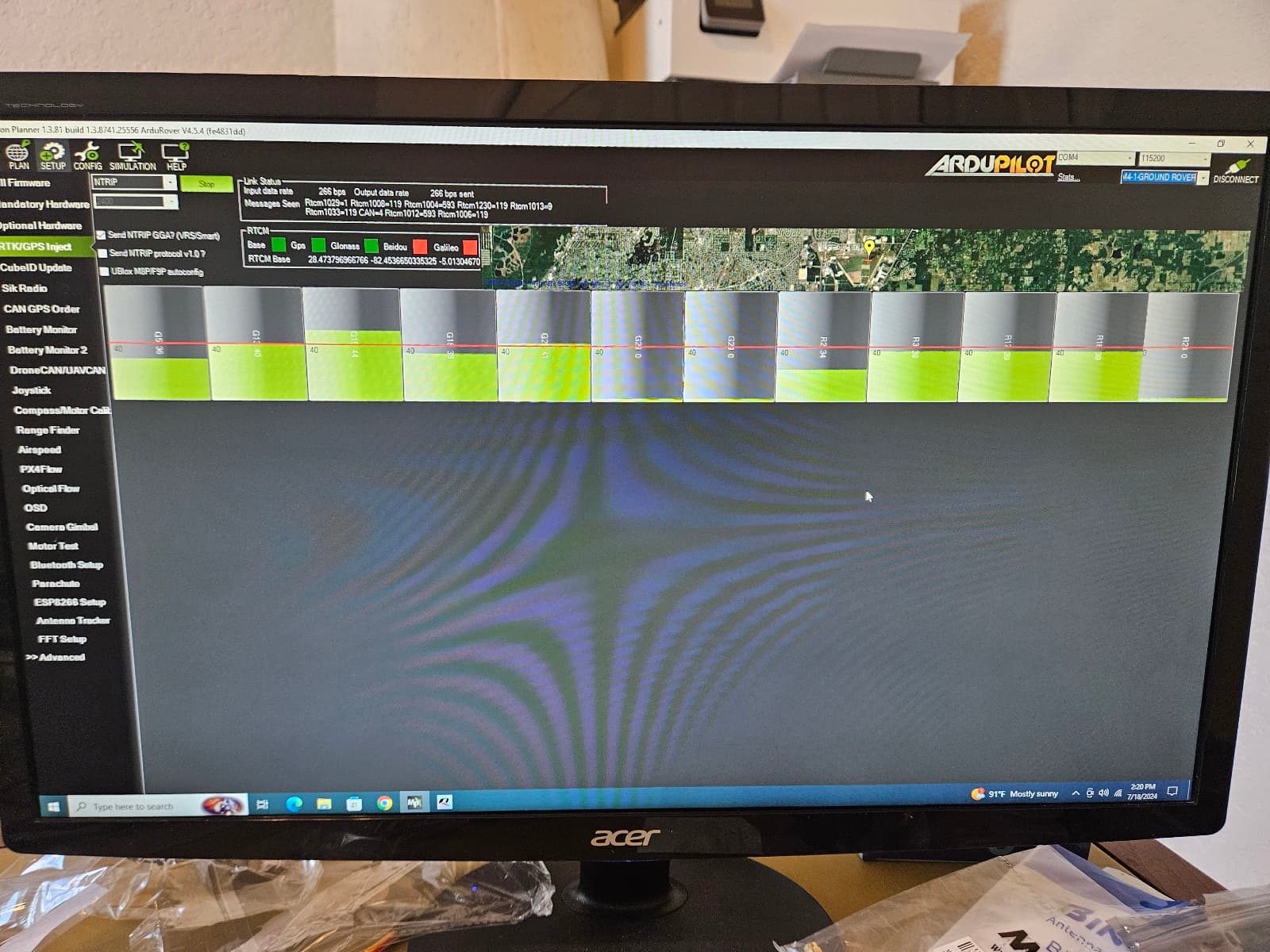
Did a quick test. changed to MSM4 and picked up all the 1074, 1084’s etc. And added Beidou and Galileo. At upper left, “Send NTRIP GGA?” is checked. Also could be “send NTRIP protocol v1.0” is possible, but that sounds old. GPS is still “3D Fix”. I’ll do the 115K next… Wondering if its getting data from the LC29 but not putting data into the LC29? The wires look OK, but maybe its that link? Is there a way to see the raw data that is going into and out of the LC29?
Wow. That was a spot-on idea. Unfortunately both switches were toward serial. I turned switch to usb and back just to make sure its OK. But I wonder if the switch is defective? How to see what data the GPS is actually getting?