Hello Ardupilot community,
I know, there are already two threads with the topic:
But both are not listing my problem.
So lets do the setup process again:
Pixhawk 1:
- flash different Firmware
- flash Copter 3.5.2
Connect with MissionPlanner:
Telem1:
- Set BRD_SER1_RTSCTS to 0
- Set SERIAL1_BAUD to 115
- Set SERIAL1_PROTOCOL to 1 (default)
Telem2:
-
Set BRD_SER2_RTSCTS to 0
-
Set SERIAL2_BAUD to 115
-
Set SERIAL2_PROTOCOL to 1 (default)
-
Set LOG_BACKEND_TYPE to 3
Power off Pixhawk
RPi:
Dowload image and flash to SD-Card.
I tried:
- Recent raspian “Stretch” from raspberrypi.org
- APSync latest from http://firmware.ap.ardupilot.org/Companion/apsync/
- APSync “apsync-rpi-20170907121043.img.xz” from the “beta” subfolder
raspian and APSync beta are behaving in the same way…
After installation:
sudo raspi-config >> Interfacing options >> Serial >> disable login shell and serial hardware
sudo nano /boot/config.txt
Add the lines:
enable_uart=1
dtoverlay=pi3-disable-bt
Update mavlink installation on RPi:
sudo apt-get update #Update the list of packages in the software center
sudo apt-get install screen python-wxgtk2.8 python-matplotlib python-opencv python-pip python-numpy
python-dev libxml2-dev libxslt-dev
sudo pip install future
sudo pip install pymavlink
sudo pip install mavproxy
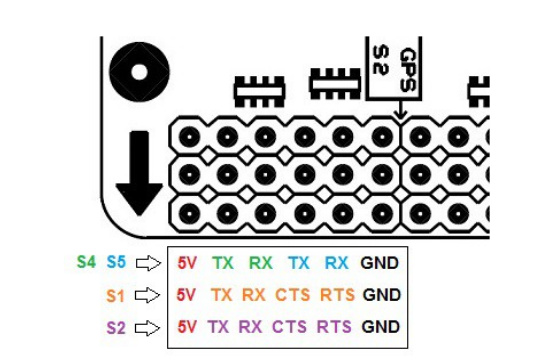
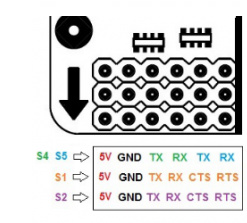
Connect RPi with Pixhawk through Telemetry Port. Do not connect +5V
(switch TX/RX as you like, one works a little bit, the other direction does not…)
Provide power through 5V USB Powerbank to both devices.
- RPi through normal Micro USB connector
- Pixhawk over Servo Rail, specifically NOT over USB
- Startup both
Connect via mavlink:
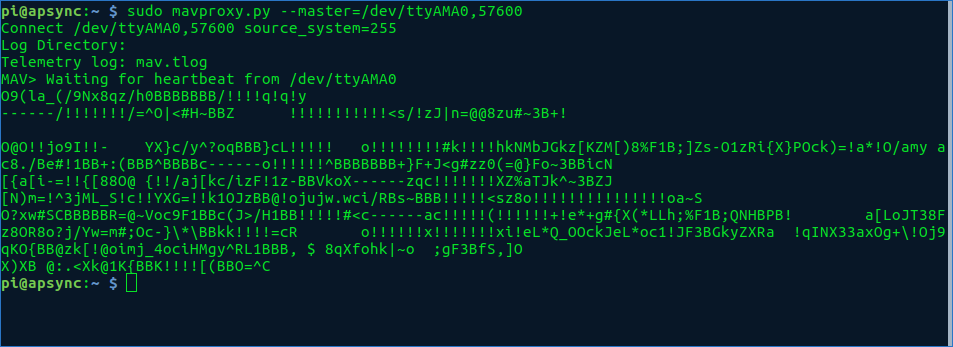
sudo mavproxy.py --master=/dev/ttyAMA0,115200 --mav10
Try to change arming checks:
arm check all
Result:
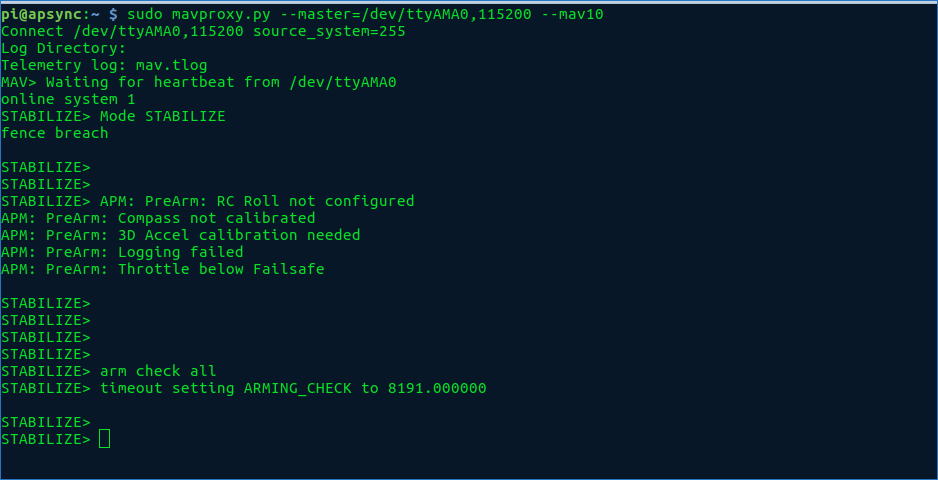
There is some kind of communication between RPi and Pixhawk. But it seems to be one direction only. Swapping TX and RX will not solve the problem.
Any suggestions are very appreciated!