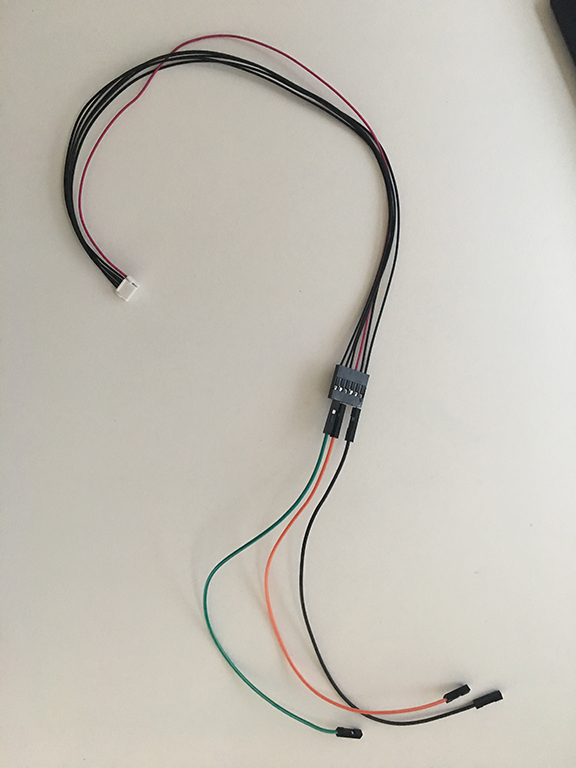
@fnoop Thank you as well for chiming in. I still seem to be having issues on making the serial work. Is there a recent and step by step source that gears more for the RPI3? Also, how were you able to accomplish the wiring from telemetry 2 to your RPI3? I basically am using a similar telemetry cable that I’m also using with my RFD telemetry radio. I’m only connecting the rx, tx and gnd. See attached img. I’m hoping my issues is not related to how I’m wiring to the Pi3. I’ve decided to do a fresh install of Pi since I’ve done so many tweaks. Lastly, is there a specific Pi OS I need to be using? I’m on the most recent. How about Ardupilot firmware? Plane, copter?