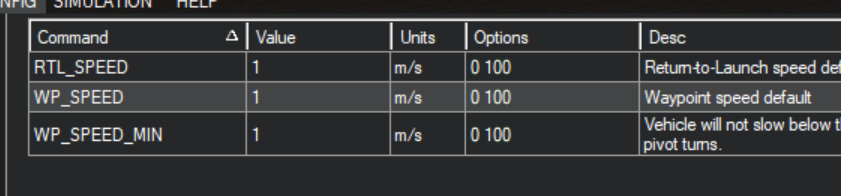
When I test Rover rtl_speed in simulation of MP. I found the rover always use WP_speed even I set rtl_speed. I hope the rover can run with a slow speed by rtl_speed. Can you tell me what problem is in my test. Below is my log and parameters in test.
That’s great.
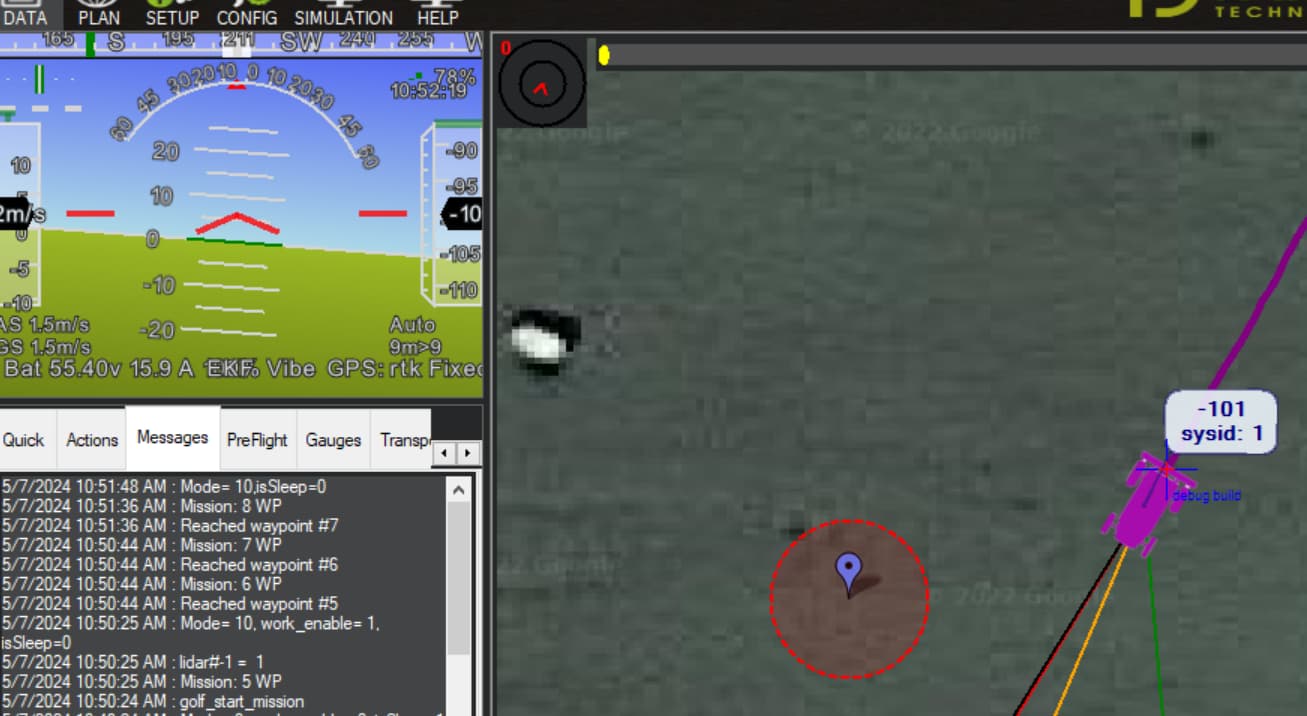
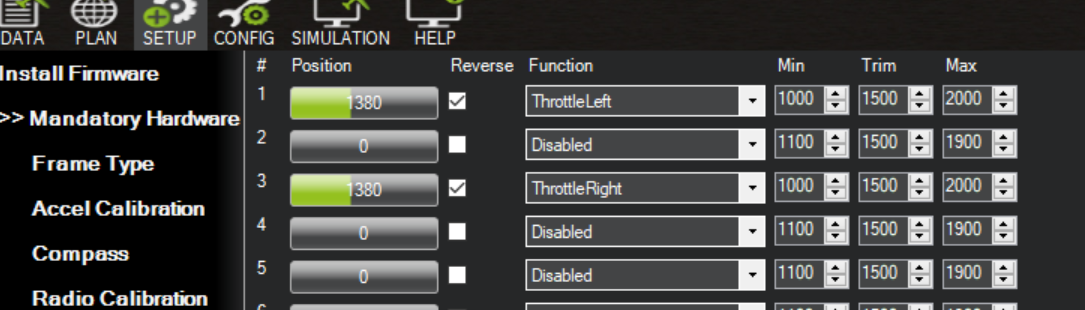
I have another problem that my rover vehicle always runs with 1.5m/s speed although I set wp_speed with 1.0m/s or less. I found the servo output is almost with the max(1000). When I run vehicle with manual to 1m/s speed, the servo output is about 1360. So, how should I do to make it work with the setting speed to run.
AUTO
Ok, stupid question, where do you set your desired speed? Your WP_SPEED is 1.5, and I don’t see a DO_CHANGE_SPEED in your screenshot or a 178 in your waypoints file.
Sorry, I just set speed with wp_seed and rtl_speed. At that time my wp_speed is 1.5, after that I set to 1, but no work. In the log the RTL_speed should be 0.6, and I also set to 1 m/s, but the rover ran with 1.5 yet.
RTL_SPEED is still affected by the bug you’ve found in the pre-built versions. Unless you built the firmware yourself and re-flashed your FC with it, it will at this time still only accept integers (i.e. numbers without decimal places).
WP_SPEED should work. Can you do another test with WP_SPEED set to 1, or even something really low like 0.3 and post the log?
I did 2 tests.
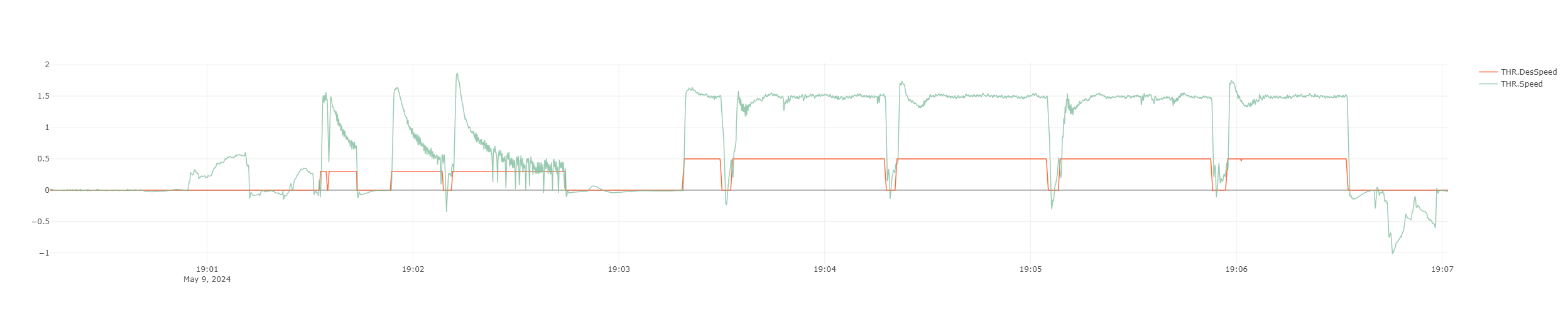
First I set the wp_speed with 1m/s, but the rover ran with 1.5 m/s.
Second, I set the speed with 0.3, this time the rover tried to slow down, but it swayed from side to side quickly. It couldn’t run normally. Then I set the speed to 0.5 m/s, it ran up to 1.5 m/s. But it can run slowly with 0.5 m/s under Manual mode like the end of the second log. The link is my two logs with both speeds.
But it struggles with maintaining it. Now the first thing I would do is updating your firmware. You’re currently running 4.1.1, which is very outdated (2021), and a lot of things have changed. You should be able to backup your parameters and restore them, but maybe a fresh configuration and tune would be a better idea.
What hardware are you using? Especially flight controller and ESCs.
It’s Cubeblack. Before I have tested with new official firmware(4.5.1), it ran with 1.5 m/s when I set wp_speed 1 m/s. I’m not sure if it can run at 0.3 m/s with the new firmware.