Refering protection with ATC_BAL_LIM_TC/ATC_BAL_LIM_THR, this is a test of the balance bot mentioned here,which has stepper motors with encoders, driven by Pololu TIC500’s, and in which an Arduino does the conversion Speed/Direction to Direct/Quadrature generating the quadrature signals:
The configuration is such that the motors move CW/CCW with a RC pulse (800/1500/2200), so that with a 1500 µs pulse the motors don’t rotate; in this way no direction signals are required.
For this test:
ATC_BAL_LIM_TC,0.3
ATC_BAL_LIM_THR,0.1
MOT_THR_MAX,90
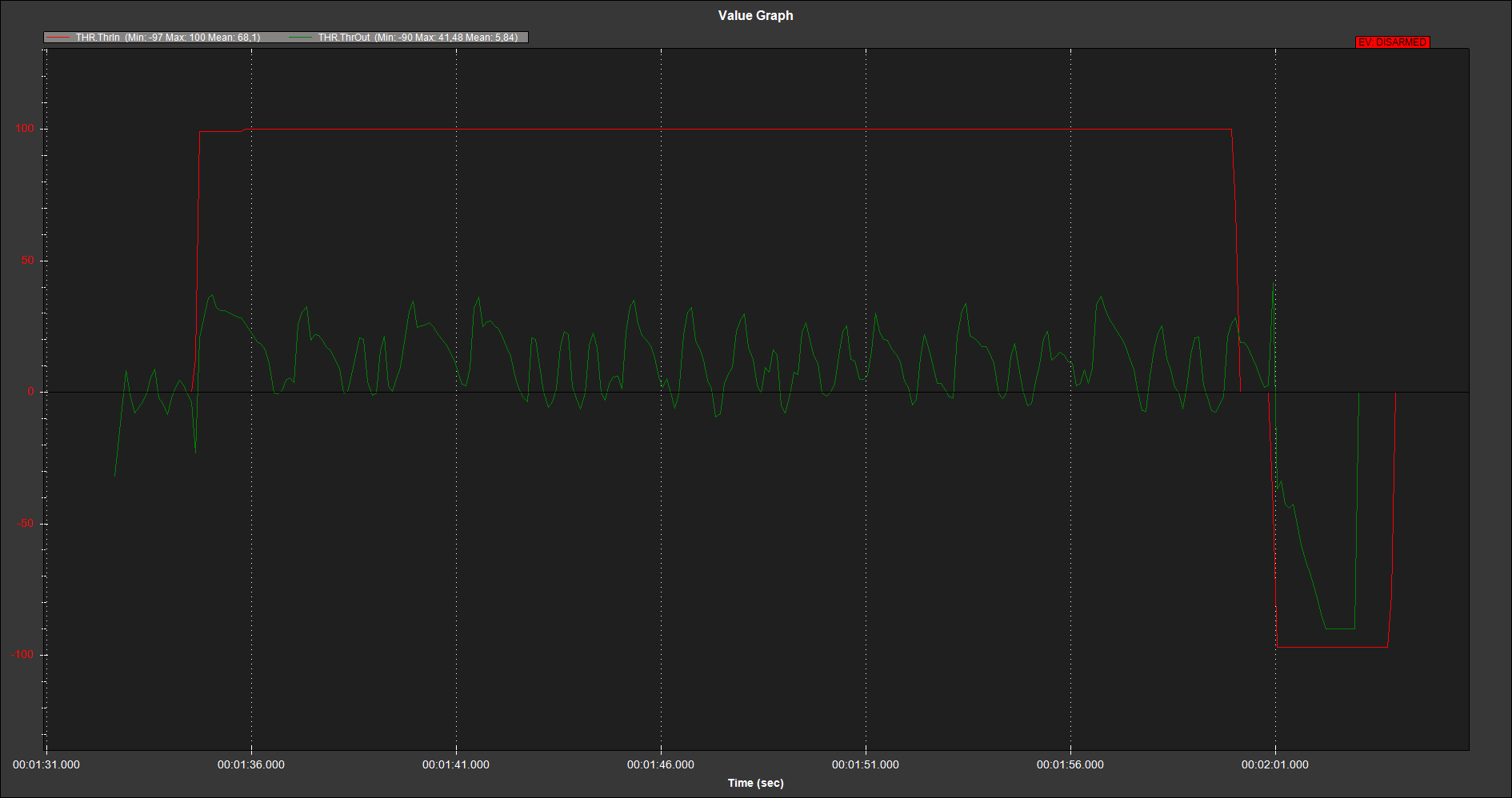
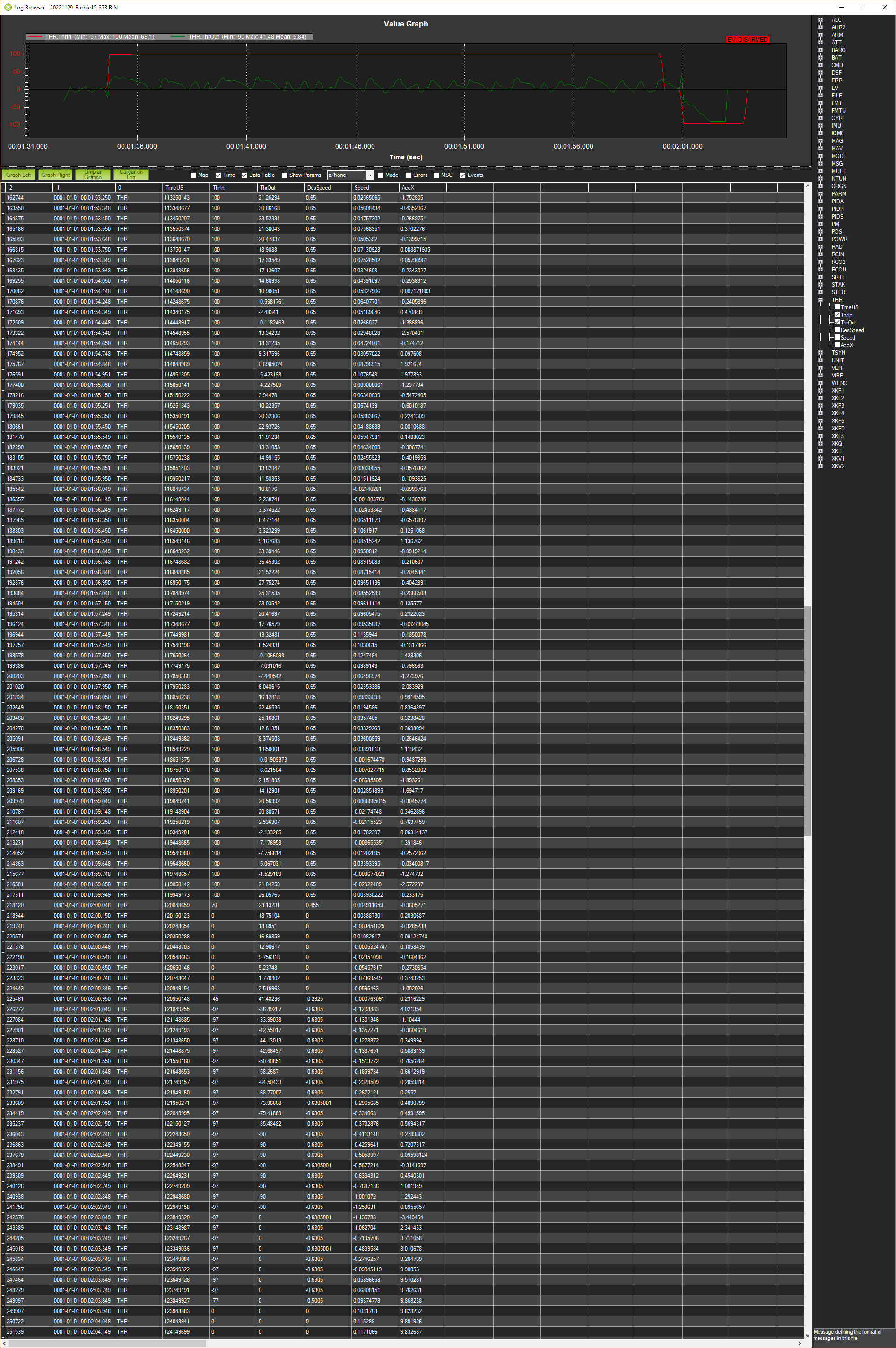
and throttle is applied first full forwards (THR.ThrIn=100) and then full backwards (THR.ThrIn=-97).
With THR.ThrIn=100 the protection works but not with THR.ThrIn=-97: THR.ThrOut grows towards -90 (MOT_THR_MAX=90), and the balance bot falls immediately.
This capture shows the THR messages:
Is the protection applied when THR.ThrIn>ATC_BAL_LIM_THR or when abs(THR.ThrIn)>ATC_BAL_LIM_THR?