Oh, so you think that the new branch is no more accurate than Rover-4.3.0-beta1?
I have seen improvements with a better WENC_POS_Y/WENC2_POS_Y adjustment. But I will have to compare:
- Rover v4.2.3,
- Rover v4.3.0-beta1,
- your branch,
- your branch with timing+rounding (five files),
on the same vehicle with the same mission and even repeat. Give me a couple of days (my feeling or preference is one of the last two).
1 Like
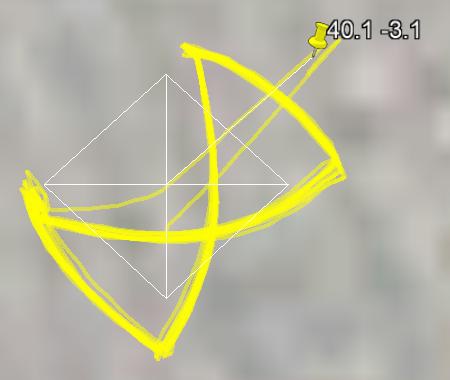
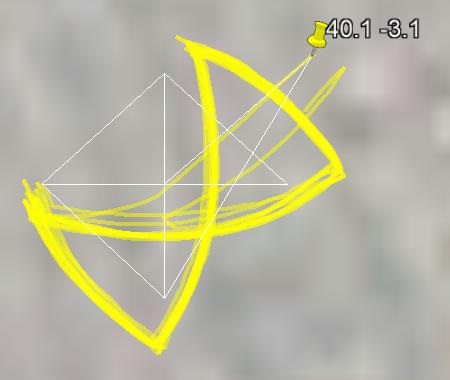
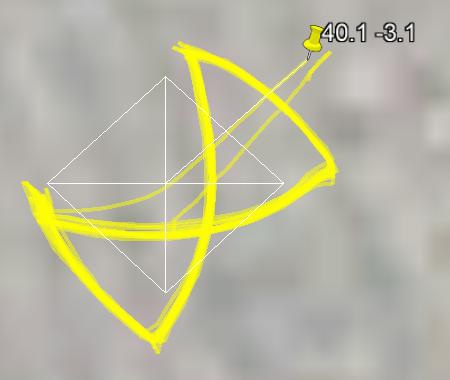
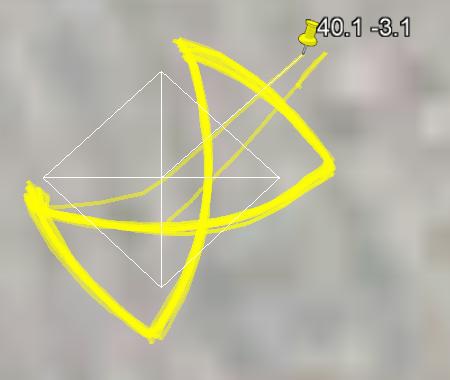
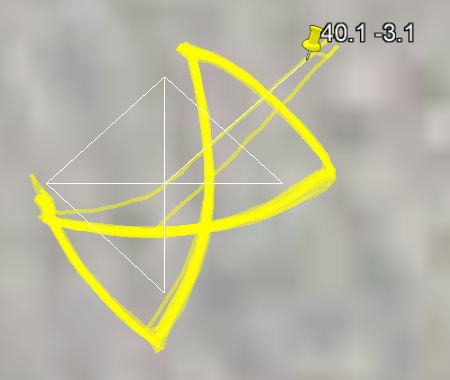
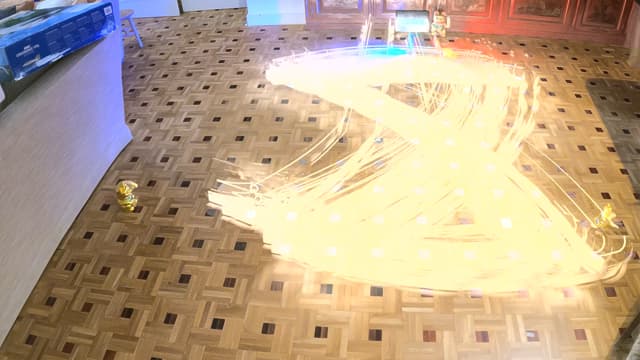
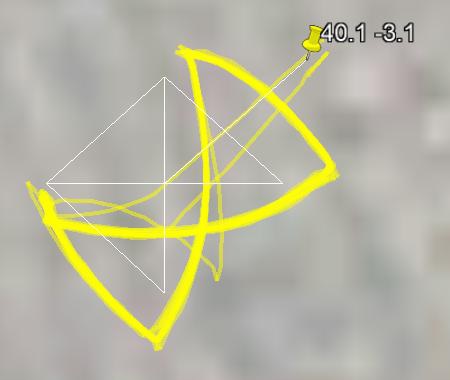
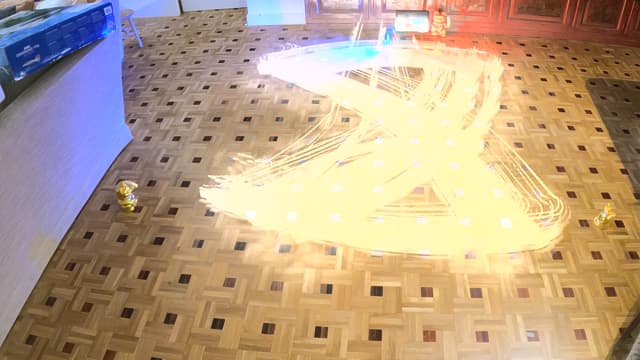
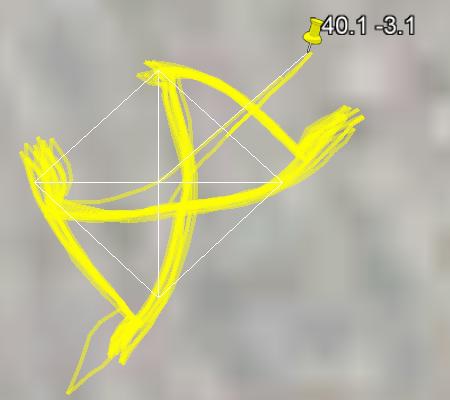
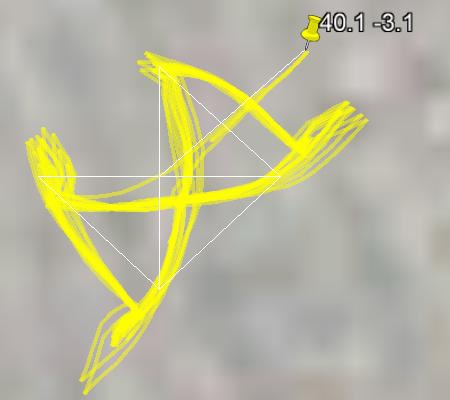
Since it was difficult to succeed reliably on the long lap mission as above, I decided a test of twelve eights around a square 1.2m x 1.2m, starting as before on virtual (40.1 -3.1) and returning to it (backwards), with two tests for each of above. Results follow.
Randy’s branch + IrqMod (five files substituted):
- Test 1 video:
")
- Test 2 video:
")
Randy’s branch:
- Test 3 video:
")
- Test 4 video:
")
Rover 4.3beta2 20221004:
- Test 5 video:
")
- Test 6 video:
")
Rover 4.2.3stable:
- Test 7 video:
")
- Test 8 video:
")

1 Like
Thanks @Webillo, so far it looks like the new branch and Rover-4.3.0-beta1 performance is pretty much identical.
At the time of this writing, Rover-4.3.0-beta1 flash and tests are pending (PIP takes a lot of computing time even on a M1), so no conclusion yet. Aditions will appear together above.
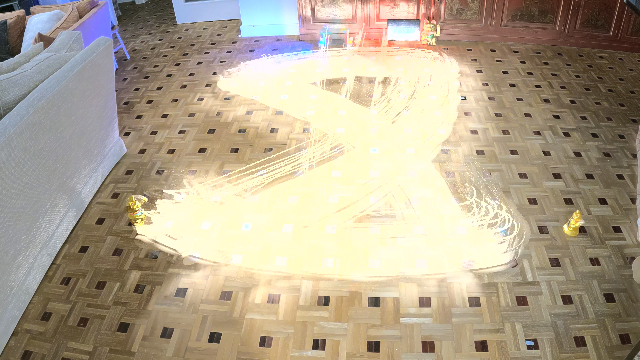
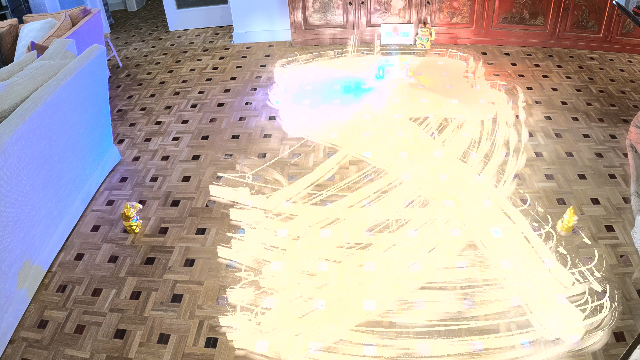
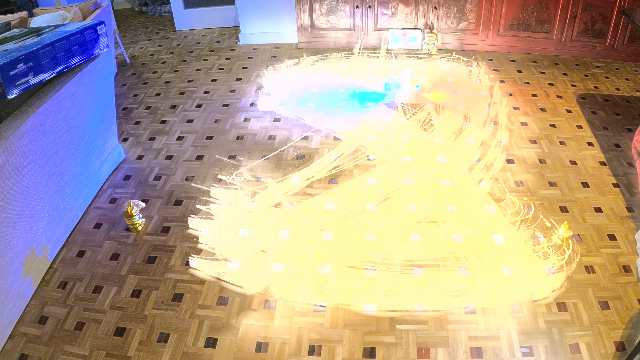
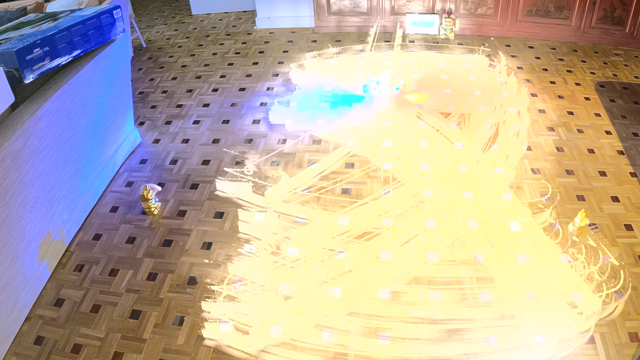
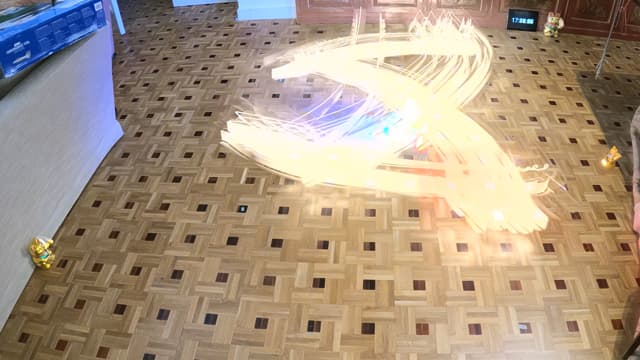
Performance shown by the Google Earth fingerprints is very similar, but that shows where the vehicle thinks it is: videos show where it really is, and there are differences (see video fingerprints). For example, mission end (when yellow trace retracts (on mission waypoint as home (also (40.1 -3.1)))) mostly appears east of home point with same latitude, but really it is south of it.
Completion at 20221007:
- Randy’s branch+IrqMod: test1 GEfingerprint+video+VideoFingerprint, test2 GEfingerprint+video+VideoFingerprint (complete).
- Randy’s branch: test3 GEfingerprint+video+VideoFingerprint, test4 GEfingerprint+video+VideoFingerprint (complete).
- Rover-4.3.0-beta2 20221004: test5 GEfingerprint+video+VideoFingerprint, test6 GEfingerprint+video+VideoFingerprint (complete).
- Rover-4.2.3stable: test7 GEfingerprint+video+VideoFingerprint, test8 GEfingerprint+video+VideoFingerprint (complete).
- Other?: empty set ∅.
Conclusions:
- Trajectory followed better in v4.3betas than in v4.2.3stable, although difficult to differentiate fidelity in v4.3betas, both with Google Earth fingerprints and with video fingerprints (program quality different).
- Vehicle completely silent in v4.2.3stable, but with tilt oscillations that cause great teeth noise in v4.3betas, so unless a better tuning is possible (how?) it seems difficult to justify the change, since v4.2.3 is sufficiently precise.
- All versions with occasional communication failures, even with balance bot, ground station and router in the same room (wifi is used).
- Message AP_Logger: stuck thread (write) at the beginning with v4.2.3stable; however, bin logs appear normally.
1 Like