For balance bot, after adapting parameters as described here, I cannot stop tilt vibration with Rover v4.3’s (discussion), so by now I prefer v4.2.3. What else can I try?
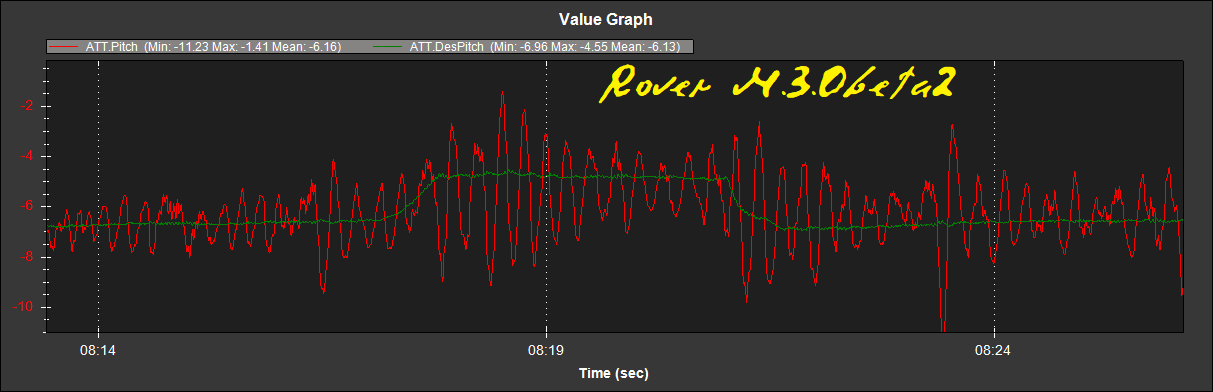
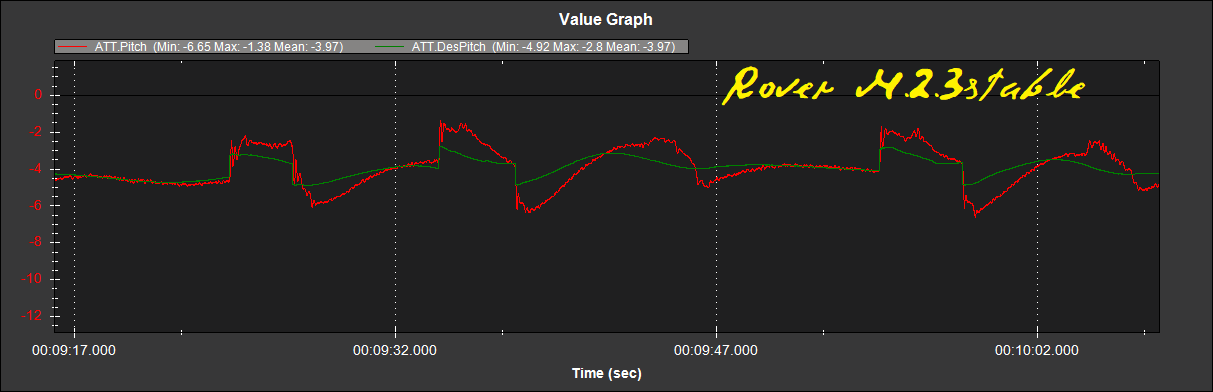
ATT Pitch vs DesPitch 's
For balance bot, after adapting parameters as described here, I cannot stop tilt vibration with Rover v4.3’s (discussion), so by now I prefer v4.2.3. What else can I try?