In sync with the Copter release, Rover-4.1.0-beta4 has just been released for beta testing.
The changes are listed below and are also in the Release notes.
Changes from 4.1.0-beta3
- Rover/Boat specific enhancements and bug fixes
a) DShot support fixed
b) Simple Avoidance fix to allow backing away from obstacles
c) THR onboard log message logs forward-back acceleration
d) Waypoint delay of -1 does not delay - Minor enhancements (or changes)
a) CSRF telemetry improvements to power setting and pass param requests more quickly
b) CUAV X7/Nora supports ICM42688P IMU
c) Pix32v5 USB product string fixed and IMU heater enabled
d) RunCam Hybrid supported (see RUNCAM_TYPE parameter)
e) VisualOdom feature removed from 1MB boards - Bug fixes
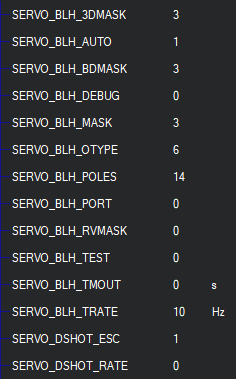
a) BLHeli Auto only affects telemetry passthrough to ease setup
b) Circular complex fence radius not truncated
c) CubeOrange serial1/2 DMA fixed
d) ESC telemetry fixes including motor index on boards with I/O mcu
e) I/O MCU reset fix if user had disabled safety switch (recovery from reset would leave motors not spinning)
f) MSP temperature scaling fixed
g) PreArm check of roll/pitch and yaw angle difference fixed
h) Serial port info file (@SYS/uarts.txt) easier to understand
i) Scheduler fix of premature run of tasks every 11min
j) Visual odometry yaw alignment fixed
We still have a number of issues to resolve before 4.1.0 can become the stable release but we’re making good progress thanks very much to our beta testers!