That doesn’t sound good at all. Sorry for the troubles…
the MP evaporation issue has been reported by numerous users (about 5) including myself. I hope @meee1 can get to the bottom of it but he’s struggling to reproduce it with his setup.
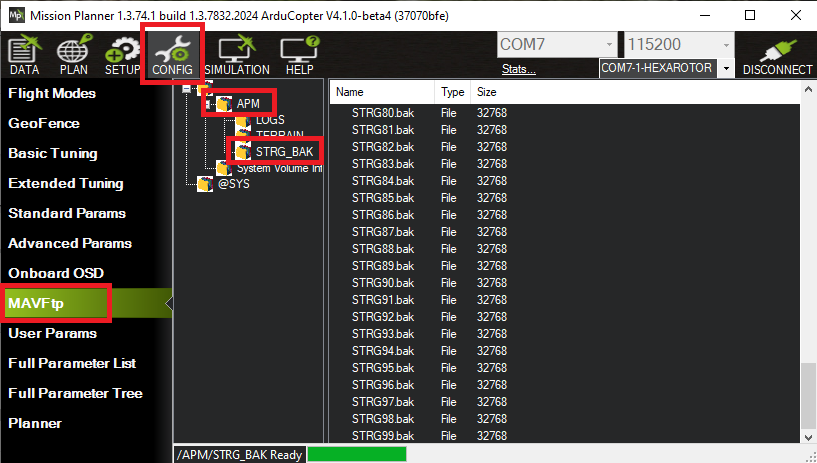
Re the parameter loss, were all parameters lost or just some? If all were lost then this sounds like the parameter-reset-issue which shouldn’t happen anymore because 4.1 includes protection against this. AP will record an “internal error 0x10000000” which should appear on the HUD if it has restored the parameters (which maybe it didn’t). It also keeps a backup of parameters in the APM/STRG_BAK directory. If you have time could you send me any onboard logs, tlogs and the contents of this directory? No pressure though.
I’ll investigate the Rover fence avoidance feature. This release includes some fixes to how the vehicle backs away from obstacles My short-term guess is setting AVOID_BACKUP_SPD=0 will restore the previous behaviour.
Thanks for the quick reply Randy. I’ll see if I can snag some logs before I’m done for the night.
I’ve seen the MP evaporation act before and watched a bit of the discussion. Usually a simple update to the latest beta fixes it. This time, it was a little worse.
Most of the parameters were saved. The lost ones were mostly anything having to do with accelerometer calibration.
I’ll set the avoidance parameter as suggested for now - thank you again!
I don’t see AVOID_BACKUP_SPD as an available parameter, even after a refresh (I don’t have simple avoidance enabled). However, the avoidance algorithm seems to be behaving normally on missions where the waypoints do not fall within the fence confines.
I should be able to get some logs and data to you later.
Randy, I’m uploading all of the logs from today’s session - I’ll email you a link as soon as the upload completes.
I think you’ll see a brief boot in beta3 and then all subsequent logs under beta4, along with the parameters I changed after my first miserable attempt in auto mode (check out that short NAVL1_PERIOD when things aren’t calibrated!). The BRD_IMU_TEMP parameters were not lost in the update - I simply had not updated them properly in the saved file I used for recovery.
@Yuri_Rage as far as I can recall, we haven’t changed anything in Rover’s BendyRuler since the Beta release began, so nothing should be different in your usecase.
Also, waypoints inside the exclusion fence are a strict no go! We do not protect against that case as far as I remember, and the vehicle will keep trying to “reach the destination” but obviously fail to do so.
I just updated one of my rovers with dual CAN GPS to 4.1beta4 (Mateksys H743-Wing). Missionplanner 1.3.74.1 had the CTD (evaporation?) problem. Version 1.3.74.2 (build 1.3.7842.42227) is working fine so far.
Thanks for the report. It definitely seems to be dual-GPS related. I’ll bet if you set GPS_TYPE2 = 0 it will stop evaporating. This is not a long term solution of course though. Hopefully @meee1 will get to the bottom of this.
Thanks, Rishabh. I figured perhaps my poor waypoint placement could be to blame, which is why I mentioned it. I spent the remainder of the day running missions without waypoints inside the fences, and performance was as expected.
The problem is that my mission planner is 1.3.74 build 1.3.7563.27684 and it closes when it connects to my pixhawk 4.
According to @rmackay9 the latest beta version (1.3.74.2) doesn’t close but I don’t know where to download it.
has someone use this system as a gps anchor? install the ,motor at the front of boat and FC on the top of outboard ? so it can be as a gps anchor。 i have bought a outboard, i will add a servo to control it,
first, i need to change the esc,. and connect to pix4.
yes,i saw it beford ,but it has 2 motor to control it, and it let the boat in same angle, it will cost most power, like the gps anchor, it just need one motor. with vector ,put it on the front of the boat, and the fc doesnt intall on boat, it is on the top of motor. it means just the motor stall at the same place, the boat will rotate around the mtor by the stream. it will save alot energy. it let the baots bow at the same place not the boat, just like an person pull the bow ,when we stop boats, we put the anchor one the front of boat. i hope you can understood. bcs my english is so-so.