Success at last been playing around with the parameters and finally got it working. although it’s working not very accurate at the moment. I am considering a moving base
3 card setup.
Thank you all very much for you help and patience.
Glad you have some signs of life.
I just noticed this recent topic you may want to follow:
It will at least give you some justification for a product return, if nothing else.
I am all pumped up now its working! its about 0.5 to 1 meter accuracy atm. dont know why I got a good rtk fix i have front steering single wheel so thinking of skid steering instead,
Ok currently setting up my moving base configuration my new main base 2B card will be here this week. looking at the configuration download files is offers
1Hz. 5Hz. 10 Hz. which one is correct?
Does the exiting rover need a different config file to work with the moving base?
It was mentioned on this thread that the uart labeling is wrong.
Can you confirm the my wiring is correct please.
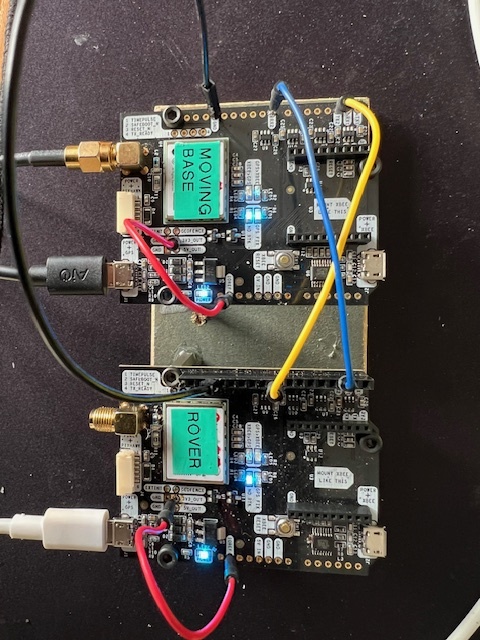
One last thing When setting up the port messages can I just use RTCM3 without the Ublox/Nema messages?
The wiring looks roughly correct, but you are approaching this all wrong by continuing to reference ArduSimple’s documentation over ArduPilot’s own.
You need to use u-Center exactly one more time to reset both of your boards to default. Use the little gear icon in the lower right of this screenshot (the one with the red dot).
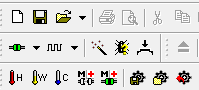
Then close that horrific software and never open it again.
Use this page as your reference.
Cliff’s notes:
AHRS_EKF_TYPE,3
EK2_ENABLE,0
EK3_ENABLE,1
EK3_SRC1_YAW,2
SERIALx_PROTOCOL,5 (x is the serial port for the moving base)
SERIALy_PROTOCOL,5 (y is the serial port for the rover)
GPS1_TYPE,17
GPS2_TYPE,18
GPS_AUTO_CONFIG,1
GPS_AUTO_SWITCH,1
GPS_RATE_MS,200
GPS_RATE_MS2,200
GPS_POS1_X, Y, and Z (set relative to vehicle pivot point in m)
GPS_POS2_X, Y, and Z (set relative to vehicle pivot point in m)
GPS_DRV_OPTIONS,1 (to take advantage of your crossover wiring - which was unnecessary, but since you did it…)
Finally, it is very poor practice to power any board that uses an antenna without first connecting the antenna. I think ArduSimple has some protection circuitry for that, but you risk blowing out amplifiers by leaving the antenna disconnected.
As for the fixed base, use Mission Planner’s feature to auto-configure the F9P and again, forget about u-Center.
Ok Thank You. Will comply!
I could not find EK2_
I think I read it’s not used now so maybe it’s discontinued.
you mentioned I didn’t need the cross over wiring, what other method could I have used?
I have completed the moving baseline assemble. Not working.
I have the two GPS helical antenna’s mounted on a 50- mm plate, when I turn the plate there is no heading change. I have removed the M10 compass and disabled all the compass’s in the compass calibration page. I have also tried it with the M10 compass plugged in. I am back with EKF VARIANCE

issue Please see bin file
moving baseline only works with a full RTK Fix, it wont work with RTK Float.
In other words, go outside and get a full sky view.
Your logs have access restrictions.
It’s raining heavy here today so can’t get outside atm.
Should both GPS 1 and GPS 2 READ rtk fixed? When correctly configured.
Also.Do I need to use rtk injection?
Thanks
Just GPS2 (RTK Fixed) for basic moving baseline. It gets its corrections from GPS1. You do not need external corrections for yaw. You do if you want precise positioning overall.
The fact that GPS2 has an RTK fix at all is a good sign. But don’t expect much success indoors.
I can get rtk fixed no problem outside.
This maybe a very basic question, with the two yaw antennas do I need a third GPS for the navigation?
No. What you have does it all.
Thank you. I asked because my accuracy is about .5 to 1 metre. I have the two helical antennas
Plugged into telem 1& telem 2.
Without external corrections, anything better than a meter precision is admirable.
I thought I was getting corrections from the main base. I simply not getting how this works.
What about the one cm accuracy
Your display above indicates you are not sending/receiving external corrections.
If you have changed things to incorporate them, then your precision should be on the order of centimeters. 1cm is extremely optimistic for anything in motion.
Pixhawk 6c
I have read that Radio Comms should be plugged into Telem 1 or Telem 2
If GPS_1 is plugged into telem1
and GPS_2 plugged into telem2
Where do you plug the radio comms?
Also what comms are you using between PC and Rover?