Go to CONFIG –>Full Parameter List .
Given that the firmware versions might differ from yours, there is a list of all parameters that have been modified compared to the default configuration below:
COMPASS_ENABLE,0
COMPASS_USE,0
COMPASS_USE2,0
COMPASS_USE3,0
EK3_MAG_CAL,5
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
GPS_POS1_X,-1.25 *This value must contain the distance in meters between antennas. Change sign if heading has a 180deg offset (or swap SMA connectors in simpleRTK2B+heading).
GPS_PRIMARY,1
GPS_RATE_MS, 100
GPS_RATE_MS2, 100
GPS_TYPE,0
GPS_TYPE2,2
SERIAL1_BAUD,460
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,5
Press Write Params to save
Pixhawk 6C M10 compass
RTK boards ardusimple2b working fine
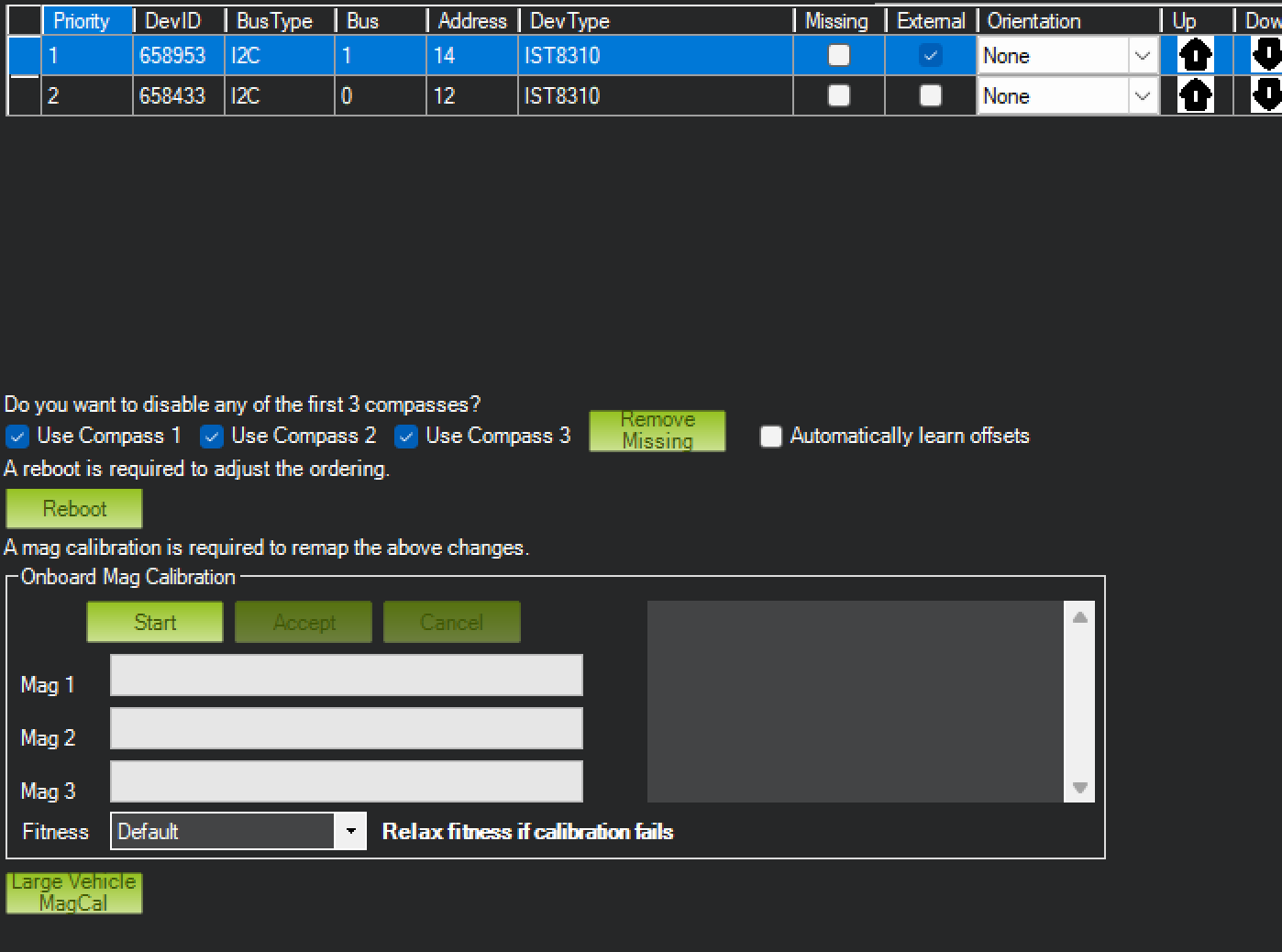
So you have a moving baseline capable configuration and are using 3 compasses? That makes no sense.
Also, set this (regardless of what ArduSimple tells you - the faster 10 Hz rate is incompatible with good data flow to the autopilot):
GPS_RATE_MS,200
GPS_RATE_MS2,200
Beyond that, I’m leaving you to the capable hands of the ArduSimple support team because I have repeatedly recommended that folks not use the SimpleRTK2B+Heading hardware with ArduPilot due to its incredibly finicky configuration. I have used it with success, and I have tried very hard to support it in the past, but it takes hours of my time that I do not have to troubleshoot user issues with it.
I love ArduSimple, and I use a pair of SimpleRTK2B (full sized) boards on many of my projects. The +Heading variant is a stubborn little dude, though.
The SimpleRTK2B+Heading kit contains two GNSS modules that are sandwiched together. The way they communicate together makes it tough to integrate with ArduPilot without custom settings loaded via the incredibly frustrating u-Center software (that you are struggling with).
If your budget allows, I recommend a second SimpleRTK2B budget board. Remove the daughterboard from your existing one.
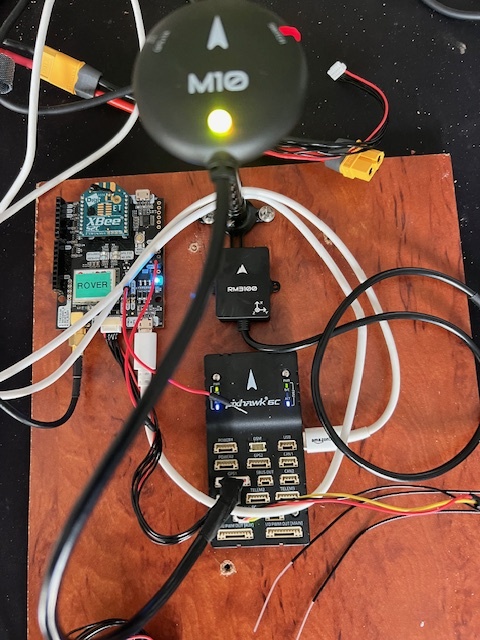
Holybro Pixhawk 6C
Holybro DroneCAN RM3100
Holybro M10 GNSS module (that contains an external compass and u-Blox M10 GPS)
ArduSimple SimpleRTK2B
XBee radio for RTCM3 from a fixed base
What I recommend:
Disable the internal compass no matter what.
Discontinue use of the M10 module.
Source a second ArduSimple SimpleRTK2B for use in a moving baseline config.
Optionally discontinue use of the RM3100.
Alternately:
Discontinue use of the M10 - it’s only adding complexity and not likely adding value, especially the way you’ve been struggling.
Calibrate the RM3100 properly.
What is missing:
Do you have a way to use a GCS computer (ideally, near your fixed base) while this system is in operation? If so, we can recommend some cleaner methods of configuring the SimpleRTK2B system (whether single or dual).
I am not using the RM3100 it was causing issues but when I am up and running I hope to return to it I updated the firmware for it this morning, bad mistake!