Good afternoon all,
I am using a Pixhawk 2 cube in conjunction with a vision system to develop some vision based flight control.
Correlating attitude information from the Pixhawk with the vision information is critical.
What breaks this correlation is the settling time of the attitude measurements from the Pixhawk. It seems to be over 10 seconds!
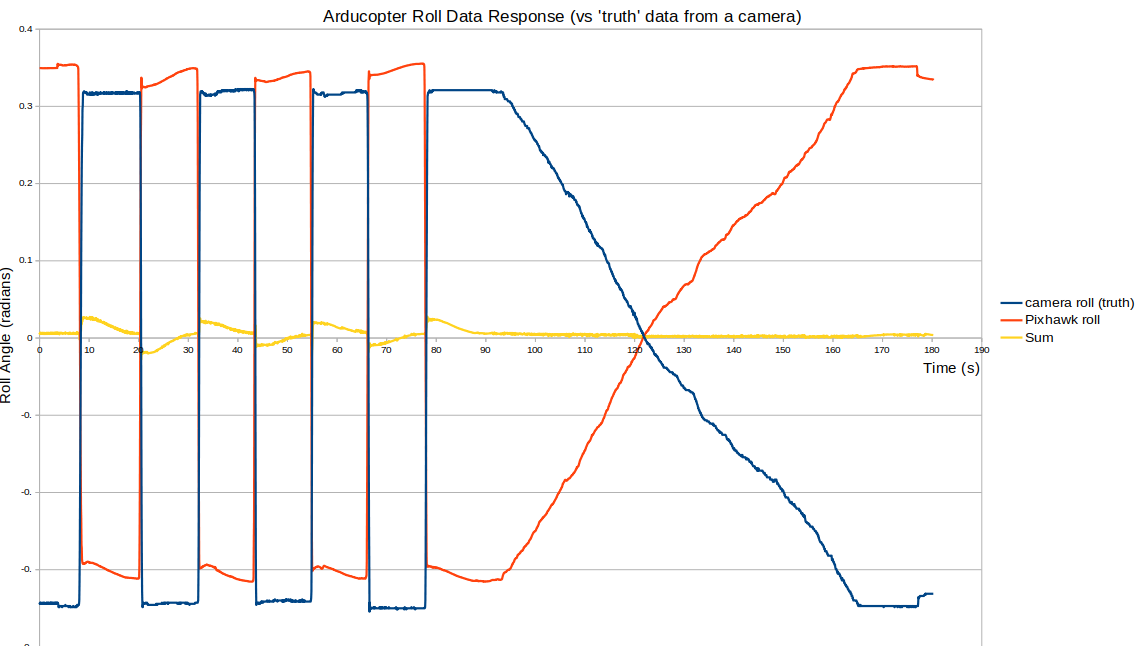
When stepping the attitude of the airframe (Pixhawk and camera together) while the camera focuses on a point on the ceiling, the airframe pivots quickly on a rig and hits hard stops in each direction. I am pivoting this by hand.
The vision system has NO filtering, and is therefore a good source of attitude truth (ok - it swings in the opposite direction to the roll data, but the response from the vision is what I would expect as I hit the hard stops. It stabilises instantly).
Can someone please let me know how I can reduce the settling time of the roll measurements from the Pixhawk. The 10 seconds+ is really affecting my control system!
I am running Copter 3.6.1
I’m not certain if these attachments are uploading correctly, but attached is an image of the graphed data, and the data in csv format
Thanks in advance!
Robin
pixhawk_and_camera_roll_data.txt (233.6 KB)