Hello, I ask for help, because I can’t handle it myself … Errors are repeated- GPS Glitch -Bad Variance.
frame-250 7 inches.
motors 1600 kw.
weight is about 1 kg.
I did different wiring for nutrition.
checked the noise on an oscilloscope.
Holybro kakute f7 board
Firmware 3.6.11
The GPS module is TC100.
The GPS module changed, there was a bn-880. but mistakes are repeated with everyone.
the copter sometimes does backflips, in althold.
I don’t know what else to add.
log https://cloud.mail.ru/public/5MSS/4ujYB1spm
https://youtu.be/bDq-ZFntzHU
1.param (16.2 KB)
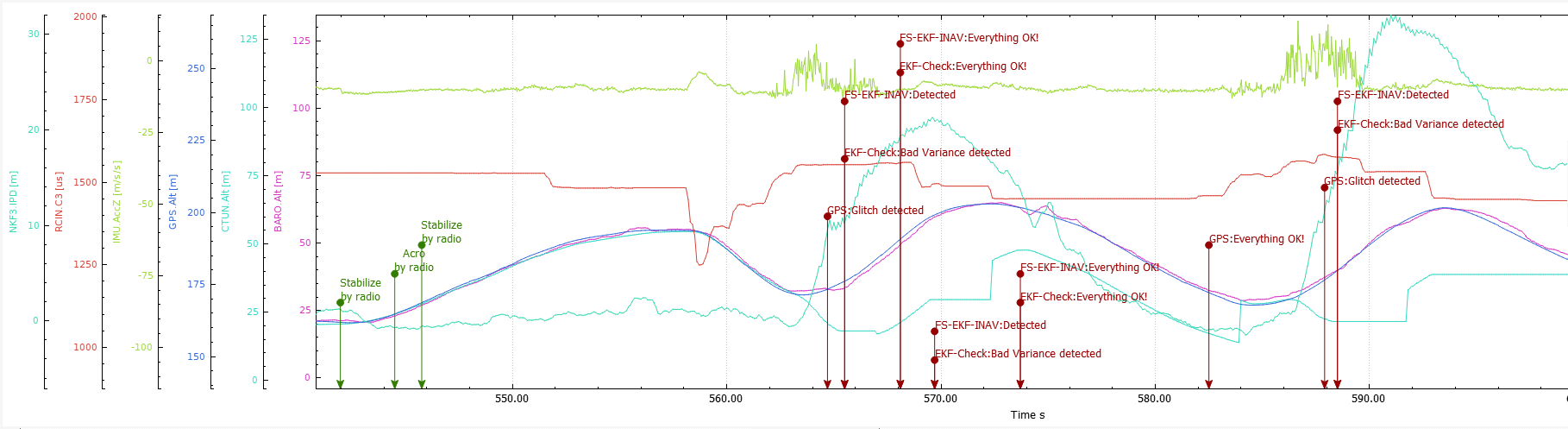
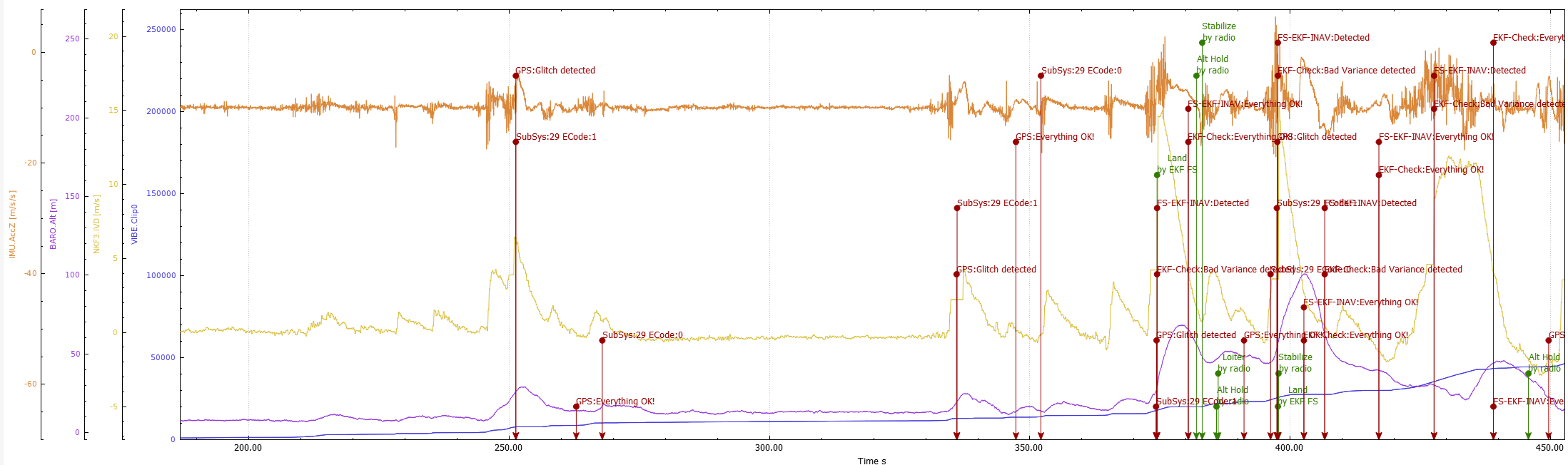
Bad vibrations, AccZ gives the false info about ascending, but GPS and BARO shows descending. This throws EKF into panic…
Thank you, how do you get such a beautiful chart? what do you use for analysis?
APMPlanner2…
1 Like
I reduced the vibration, one of the motors gave great vibrations. but there are mistakes. gps glitch. and swimming in height. I tried autotune. new log https://cloud.mail.ru/public/3jRG/fjSXAg1HB
I would suggest you reset the parameters back to default then follow the recommendations in the guide in the following link and then run Auto Tune. There are some basic parameter changes you must make for stable flight on a 250/7" size quad.
http://ardupilot.org/copter/docs/tuning-process-instructions.html
Thank you so much, it is very nice that you are not indifferent))) I am glad for your help)))
A couple other suggestions. Even with the isolated IMU on the Kakute F7 board it should be soft mounted on a multirotor. And the barometer should be covered with a piece of foam.
the board is rigidly installed, maybe this is the problem … paralon is installed on the baro. I’ll do some work tomorrow, and try to install the engines on vibration isolation.
by the way, I did not notice strong vibrations this time, from 60 to 90, is this the norm?
A rigid installation is a bad idea with this FC I think. I have a Kakute F7 and the IMU isolation is not particularity effective for a multirotor.
You can’t use an Auto Tune log to determine vibration levels. Fly again and hover for a few minutes and post that. But in general 60-90 is much too high.
by the way, I found a lot of interference using an oscilloscope, up to 20 kilohertz from esc, when the motors are running, can this interfere?
I can’t arrange the vibration, maybe it’s a gyroscope? I put the board on vibration stands and the hyposcope chip is the same on softmount. with a straight approach at a speed of 12 meters per second, everything is fine, as soon as I add speed, errors and vibration protection appear
Here is my new log, the vibrations are reduced, but I still get problems, please help
Not better, still vibrating and clipping on Z axis.
Kakute “vibration isolation” is a joke. Try adding about 15-20g weight to the sensor board to get some real dampening. (Not the whole board, but the sensor itself)
Thank you, there were vertical jumps during the flight. stick the weight on the gyro chip itself, understood