Has anyone implemented a red “Remove before flight” strap in place of the safety switch?

Maybe it could read something like “Remove to Arm”?
Its pretty simple:
When the red tag is installed, the FC cannot arm
When the red tag is removed, the FC is free to arm
How would Arducopter behave if the safety switch is simply held closed with a relay? Can it arm while the safety switch is held closed? Does that pose any safety risks mid flight?
That would make this easy; simply wire a SPST-NC relay in place of the safety switch and solder a jumper across a connector such as a deans T-connector or XT60, etc. Insert the jumpered connector, and the relay opens (ie - the safety switch is not pressed) Remove the jumpered connector and the relay closes (ie - the safety switch is pressed)
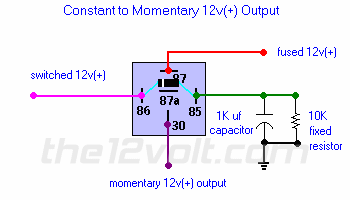
Another way, which more closely mimics the function of a momentary push button such as the safety switch, is to wire a relay in place of the safety switch and couple it with a little bit of axillary circuitry to enable a continuous signal to output a momentary voltage just like the safety switch:
LINKaloopa
The capacitor allows the coil of the relay to be energized until the capacitor stores a charge, thus de-energizing the coil. The resistor bleeds off the charge of the capacitor when positive voltage is removed from the other side of the coil. You can increase the output time by simply changing the value of the capacitor. This one will give you about a 1/2 second output.
The circuit shown here represents the common automotive bosch style relay, but the concept would be the same with a much smaller and lighter relay.
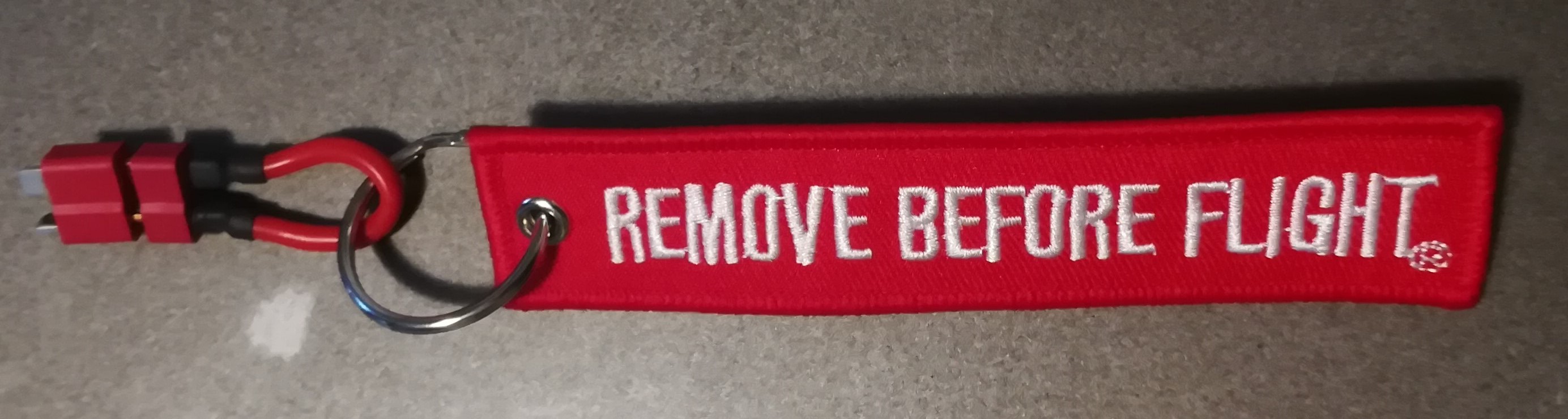
I will try to breadboard a prototype up and see how it goes. For one, i think the “Remove before flight” straps are simply cool, but it also provides a very obvious and visual reminder as well as reassurance when working on the copter when powered on that it is in a safe state - even from some distance away.
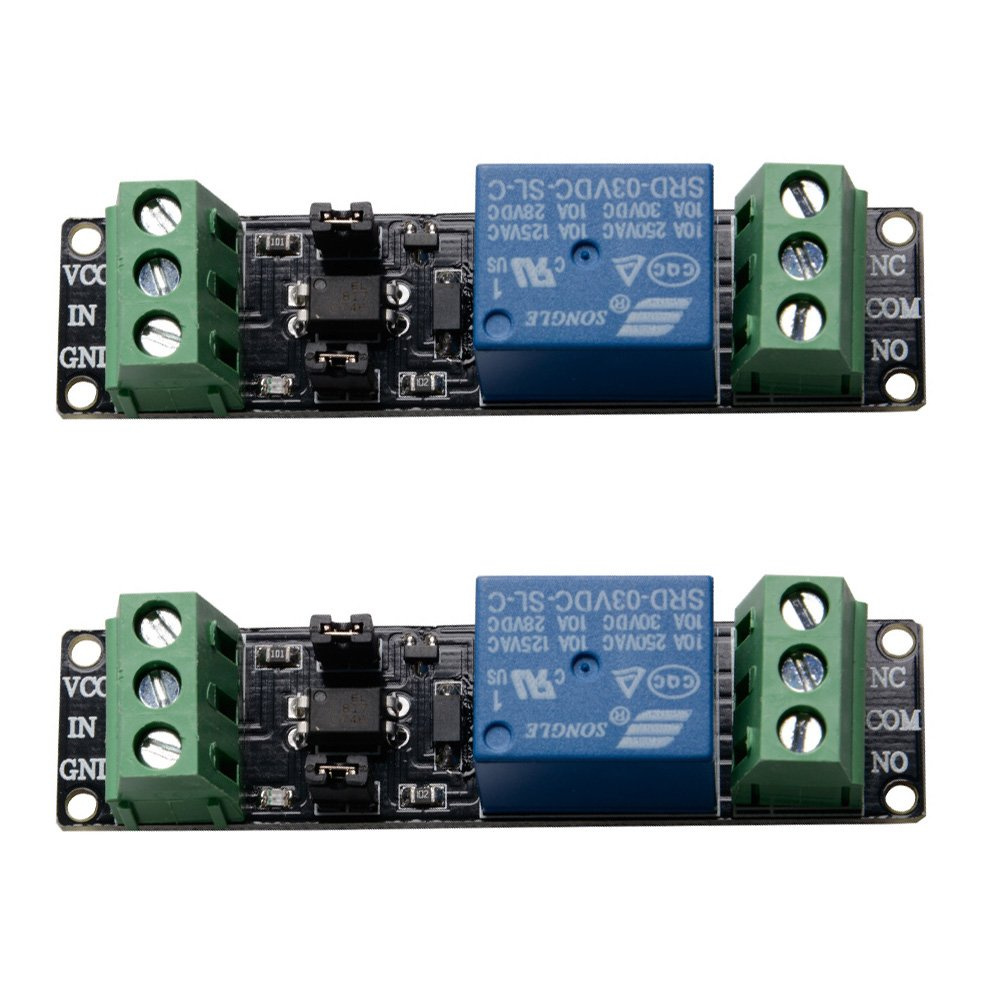
I got some little developer relay boards and some Remove Before Flight straps:
Here is what the “Safety Key” will look like:
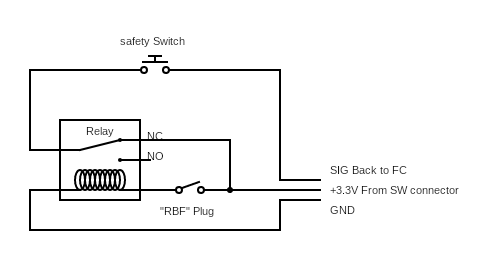
I drew up a little circuit diagram; but i couldnt figure out how to completely replace the safety switch without a circuit that would HOLD the switch closed. The problem is that using a capacitor and resistor as shown in OP as an analog timer only works when the relay is energized (ie; when the safety key is inserted). This means that when the safety key is inserted and the operator would expect the copter to be ‘safe’ as long as the key is inserted, but in reality it would only be ‘safe’ for the duration of the capacitor charge/timer circuit.
What we would really need is a circuit that would be open when the safety key is inserted, but only close for a period of time when the safety key is removed (and then go back to open to emulate the safety switch)
Maybe someone with more circuit design skills could figure it out, but i only have the basics of circuits down.
However, I have another idea: use the safety key as a redundant safety mechanism along with the existing safety switch. When the safety key is inserted, the relay is energized and opens the circuit to the existing safety switch - which would render the safety switch disabled as long as the safety key is inserted.
When the safety key is removed, the relay is de-energized and the circuit is completed which will enable the safety switch. Then the operator would press the safety switch and carry on with the standard arming procedure.
The problem here is that you could remove the safety key, press the safety switch, arm the copter, and reinsert the safety key and the copter would stay armed.
No robust solutions yet, but im still thinking.
Im not even sure if this can be done with analog means - maybe ill have to put my big boy pants on and try a tiny arduino or something for some basic programmable logic control.
ArduPilot only supports a momentary switch, attempting to adapt it as you’ve described will lead to very weird interactions. (Having to remove, then insert the key again to get it to change state).
Ok, good to know. Thanks for the input. I was wondering how it would behave with a continuous input.
Ardupilot’s support aside, I dont think my current approach is robust enough for flight. If it is really intended to be a safety feature, it really needs to be dead simple: installed = safe, removed = unsafe. Especially in an emergency situation when human reaction time might be a factor.
Like I said - I might have to look into some programmable logic or even integrating it into the Ardupilot firmware. I made a thread over in the dev forum, too, we’ll see if anyone is interested. Im good at mechanical stuff, but ill leave the software development to someone who knows more than me.
The normal way to provide this feature is that it actually cuts the power to the dangerous bits, rather then interacts through a software layer. You still need to manage the software before you pull the key, but it does allow for safer ground handling then trusting a software stack. (Most ESC’s won’t spin if they are booted with a high throttle signal which helps reduce the risk/problem here).
Youre absolutely right - this type of safety should really be a mechanical power break as opposed to a software solution.
I suppose I was trying to work within the bounds of the ardupilot FCs