Hi Everyone,
I had our maiden flight resulting in a crash last week. The test demonstrated some things I missed, and some things I learned in the process. I’m sharing this here to help future testers and get some guidance on how to approach a solution(s). Below is a graph of the event and error and log messages from the flight. I wasn’t sure how to anonymize the log so I figure this is enough information. Please let me know if you need more data.
This is what happened on this flight:
-
I had a dual GPS system setup and tested in my lab working fine. When I got to the launch site, the second GPS started triggering a “Not Healthy” PreArm message. I then deactivated this “suspicious” GPS resulting in one GPS system active.
-
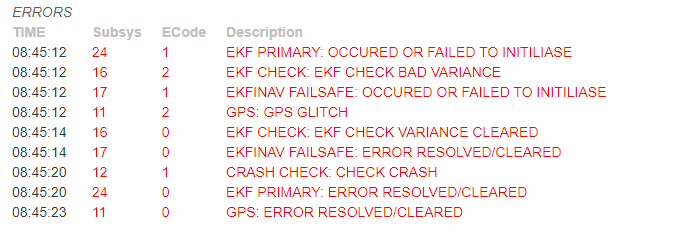
Even though I had multiple error messages (you can see them below), the system got to a point that I could arm it for take off.
-
Thinking I was in Stabilize mode (more on this on Lessons Learned) I activated the Take Off (I’m using QGC). This resulted in the drone shooting up vertically as if it was a rocket(!). I immediately switched to Stabilize and that’s when the motors seemed to have stopped or slowed down. These resulted in a fall from about 6 meters. I tried pushing the throttle up when I saw the drone falling down.
-
The crash although pretty dramatic, resulted in damage of just the landing gear and propellers. I’m very lucky.
These are my lessons learned:
-
The Herelink controller assigns the wheel to Channel 5 by default. This is why upon take off, the system is in AUTO mode. I remember “fighting” with the controller as I had a button assigned to Stabilize and after a few seconds the system would go back to AUTO. That is why you see this mode on take off.
-
Even though I did a compass calibration at home, it seemed that going to the actual site required another compass calibration because really, everything seemed to be off. The machine was telling me something

-
Looking at Mission Planner’s Log Analyzer for this flight, I got the following. This tells me that I’m way off in the Magnetic field thresholds.
Compass = FAIL - WARN: Large compass offset in MAG data (X:-217.00, Y:-343.00, Z:68.00); Large change in mag_field (205.42%); Max mag field length (1299.61) > recommended (550.00)
Here are my questions:
-
Why would the system start in Guided mode? I have not set that up and I have no idea. Perhaps somebody can guide me where to learn more.
-
I’m under the impression that Stabilize mode cut off the motors instead of having the platform hovering. Should I have enabled an ALT HOLD or LOITER instead? Could this behavior of cutting power be due that the Herelink controller throttle stick comes back to the center position if not held, indicating the motors should be at the minimum speed? What do you think?
-
How can I study those message in the graph like “motors_interlock_enabled” and “ekf_yaw_reset”?
Thank you for your help, I really appreciate it.
Marty

Log:
| 08:45:01 | ArduCopter V4.5.1 (71a2f169) |
|---|---|
| 08:45:01 | ChibiOS: 6a85082c |
| 08:45:01 | CubeOrangePlus 002A0049 30325101 33383839 |
| 08:45:01 | Param space used: 1521/5376 |
| 08:45:01 | RC Protocol: SBUS |
| 08:45:01 | RCOut: PWM:1-14 |
| 08:45:01 | New mission |
| 08:45:01 | New rally |
| 08:45:01 | New fence |
| 08:45:01 | Frame: OCTAQUAD/X |
| 08:45:01 | GPS 1: specified as DroneCAN1-125 |
| 08:45:02 | Mission: 2 Takeoff |
| 08:45:02 | Mission: 2 Takeoff |
| 08:45:06 | EKF3 IMU1 MAG0 in-flight yaw alignment complete |
| 08:45:06 | EKF3 IMU2 MAG0 in-flight yaw alignment complete |
| 08:45:06 | EKF3 IMU0 MAG0 in-flight yaw alignment complete |
| 08:45:12 | EKF3 lane switch 1 |
| 08:45:12 | EKF primary changed:1 |
| 08:45:12 | EKF variance |
| 08:45:12 | GPS Glitch or Compass error |
| 08:45:18 | Mission: 2 Takeoff |
| 08:45:18 | Mission: 2 Takeoff |
| 08:45:20 | Crash: Disarming: AngErr=165>30, Accel=0.0<3.0 |
| 08:45:20 | EKF primary changed:0 |
| 08:45:20 | Mission: 1 ChangeSpeed |
| 08:45:20 | Mission: 2 Takeoff |
| 08:45:22 | PreArm: Compasses inconsistent |
| 08:45:22 | PreArm: GPS glitching |
| 08:45:23 | Glitch cleared |
| 08:45:53 | PreArm: Compasses inconsistent |