I’m dealing with hovering issues. When in AltHold mode and releasing the throttle (ie, no RC throttle input) the system will not hover but rather descend slowly . At some point, I switch to Land mode and that’s the only time I don’t have to touch the throttle at all. The drone lands smoothly.
Here are my questions:
I played with MOT_HOVER_LEARN values 1 and 2. I decided to set it to 1 so I can learn the actual value suggested by the FC. I felt that 2 set the value of MOT_THST_HOV too low and I initially thought that was why the drone wasn’t hovering.
I tried to stay at a particular altitude for an extended time to study the flight log’s CTUN.ThI, ThO and ThH values.
I don’t understand that even at MOT_THST_HOV = 0.55 the system wouldn’t hover while the ThO and ThH stay around 0.21. Is it that ThI and ThO are relative to the MOT_THST_HOV value and therefore when it comes to hovering I basically need to increase this to reach a “hover” state?
The octocopter is carrying about 4kg of a payload.
1 will not Save what’s learned so no point in that. Looks to me that 0.2 is the hover thrust value you need. Set that and disable learning or set Learn to 2 and leave it there.
My take on tuning is that I need to figure out how to first run the QuickTune LUA script from the QGC/Herelink controller and then Autotune. I’ve searched about the QuickTune but have not found documentation or references on how to do it, aside from this video from Randy Mckay https://www.youtube.com/watch?v=K_T9ikEQmlc&ab_channel=RandyMackay
Maybe I need to use my Taranis radio and receiver to trigger the RC(n)_option parameter (annoying but doable). How did you do it? Or did you just trigger Autotune?
Thank you, will give it another try. Thing was, initially I thought at least, that using MP to trigger the quick tune was complex when I should have been able to use QGC in the Herelink controller. I’ll do this tomorrow and share the details I learn.
I read more info and was able to give the octo a couple of flights yesterday. Although I increased mot_thst_hov to 0.58 and mot_thst_expo to 0.76 (per suggestions on large props, I’m using 22"), I’m still not able to get the unit from hovering.
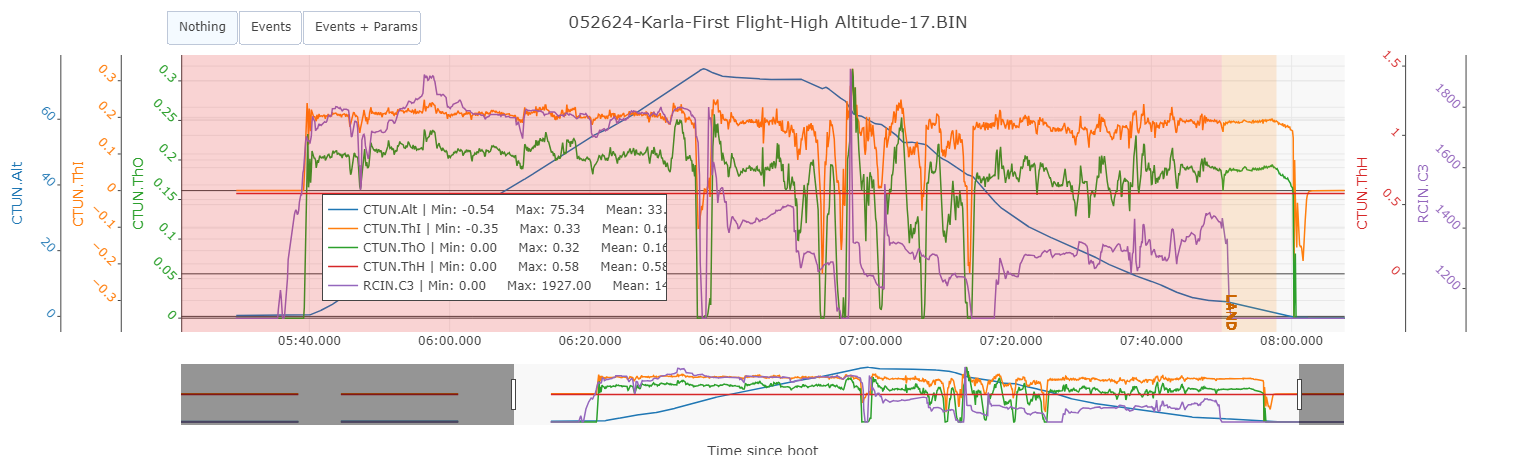
I think the reason of my confusion is no matter what I set the mot_thst_hov to, the mot_hov_learn parameter always sets it to around 0.3. Here’s a picture of all the CTUN parameters including the RC input #3 (the throttle, I thought of that just now to see when I let go of the throttle and you can see how the drone lowers in altitude). So what is happening?
I know I need to do PID tuning, but could all this hovering issue due to not having done so?
I know I need to increase or decrease the P/D ratio for adjustments. But for how much? 10%?
Quicktune would be nice but I cannot do it with my Herelink controller…bummer and I may go for Autotuning one item at a time.
I performed a MagFit and FilterReview before this flight. It all seemed ok, but I noticed that the offsets plot.ardupilot.org provide are different from the WebTools. What do you think?
I just don’t want to risk crashing this great vehicle as I’ve put so many hours into it I really appreciate all of your suggestions.
Why? A craft that required a hover thrust value of 0.58 would be grossly underpowered/overweight so clearly that’s incorrect. Set is back to ~0.2 (from both logs you have posted) and move on with tuning (which is terrible).