This is a continuation of my Bix3 QuadPlane thread using the Plane v3.8.3 firmware release. I’ll link this thread to my original one here which used v3.6.0 firmware.
Hobby King has recently released their new H-King Bixler 3 Glider in both KIT and PNF versions. It appears that the biggest change is to the decals.
After upgrading to v3.8.3, I changed a few parameters (like mixing_gain) and had a successful hover in my backyard. My initial .param file is below.
My stock forward flight motor had some lose magnets so I took the opportunity to replace it along with the crappy prop adaptor and 8x4 prop. Instead of buying a new motor I used a spare from my mini Talon QuadPlane project along with the same 9x5 3-blade prop on 4s. The SunnySky V2216-10 KV900 motor is much higher quality and uses a built-in adapter for better balance. The foam pod was cut away and I made a new plywood motor mount that is glued directly to the base. It should work great!
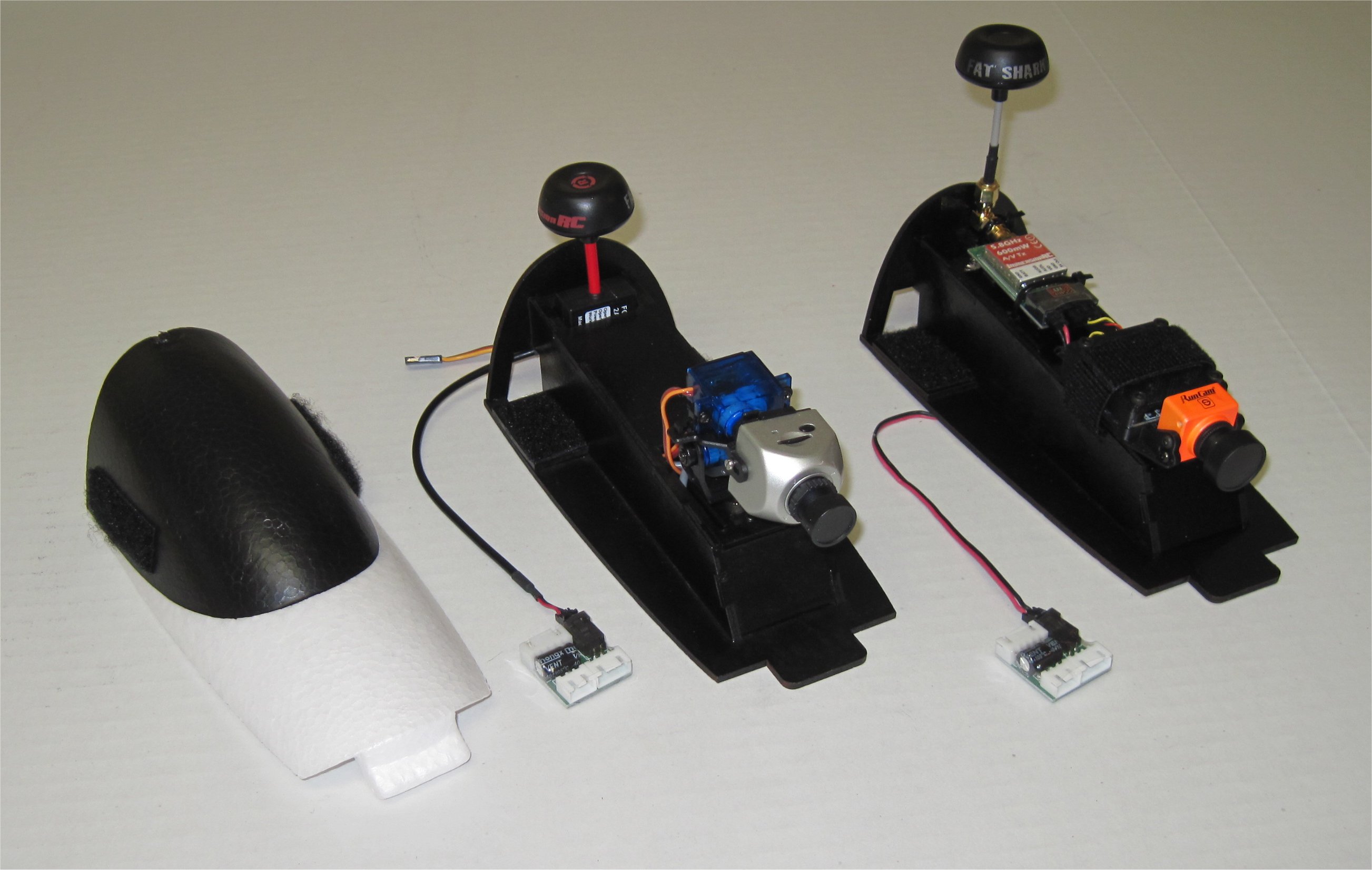
I also created a new FPV pod using a RunCam Split and an ImmersionRC 600mW 5.8GHz transmitter.
One of the nice things about the Bix3 is that you can buy spare FPV canopies for about $6. All three of my canopies weigh about 6.2oz (176g) so I can swap them around. I’ll use the weighted stock canopy for my initial v3.8.3 firmware flights then switch to my new RunCam Split canopy that uses it’s own 2s 1AH Lipo supply for the camera and video Tx. The harder mount without servo control should provide clean video. The RC Split has low latency video output for the downlink and can record in HD.
Greg, amazing job as always! I know I speak for the community when I say that you are an inspiration to many of us still learning ropes. I particularly appreciate your constant willingness to help others. This is a great build and look forward to seeing its completion. When I saw the Bix 3 released, I as well imagined it would be a great candidate for a quadplane conversion.
Thanks, Alex. It’s the winter building season up North so I keep busy and have fun fixing and upgrading existing projects. The APM QuadPlane features and Wiki documentation have both matured nicely since v3.6 so I hope it attracts other VTOL conversion projects.
Hi Greg
2 years ago I have flown my Bixler2 with my Spektrum DX8 TX. Just recently I did the conversion of this plane to a QuadPlane.
The plane hardware is working on the bench but I struggle with my newer transmitter setup for QuadPlane. I am using the same TX as you now. I have setup my Helicopters and my drone in it but cannot get it sorted with my QuadPlane, yet.( old age)
Would you be willing to give me a copy of the model setup of your Bix3 in your Taranis -plus ? Thank you.
It usually means that you didn’t keep the quadplane still (motionless) during the boot process. Sometimes it can mean that you need to re-calibrate ACC but first try keeping the plane still after power-up.
how about airspeed sensor…did u use the airspeed sensor on your bixler3…and how to set parameter on the transition without airspeed and is there any trick? coz i didnt have airspeed sensor on bixler…
I did not use an AS sensor on my Bix3 QuadPlane but I have used one on other projects like my Ranger EX and mini Talon QuadPlane.
When the AS sensor is not present, the speed is taken from the GPS. Although this doesn’t allow for wind compensation, it still works fine on calmer days and on air frames like the Bix3 that have plenty of lift. I performed many tests with Q_ASSIST_SPEED = 0 on the Bix3. It is not needed for initial transitions but helps to support lift using the quad motors if the airspeed gets to low. You should always test first using Q_ASSIST_SPEED = 0.