I will surely give it another try but please tell me are the new changes to the frame helps to reduce vibration are acceptable or i should try more ?
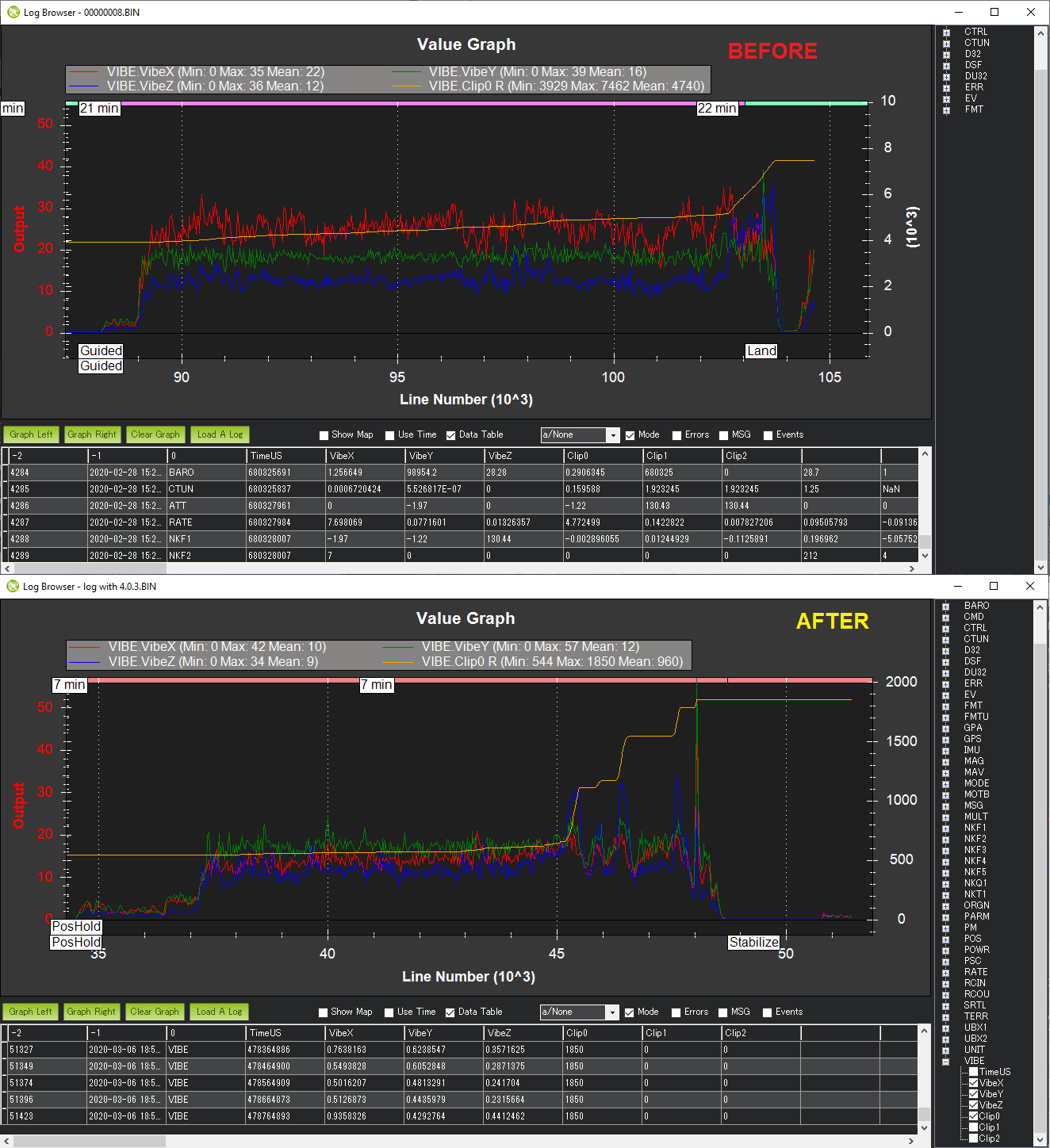
The vibration levels are better especially in the X axis (forward-back axis, see red-line in graphs below) but it’s still quite on the edge I think and more vibration isolation is required.
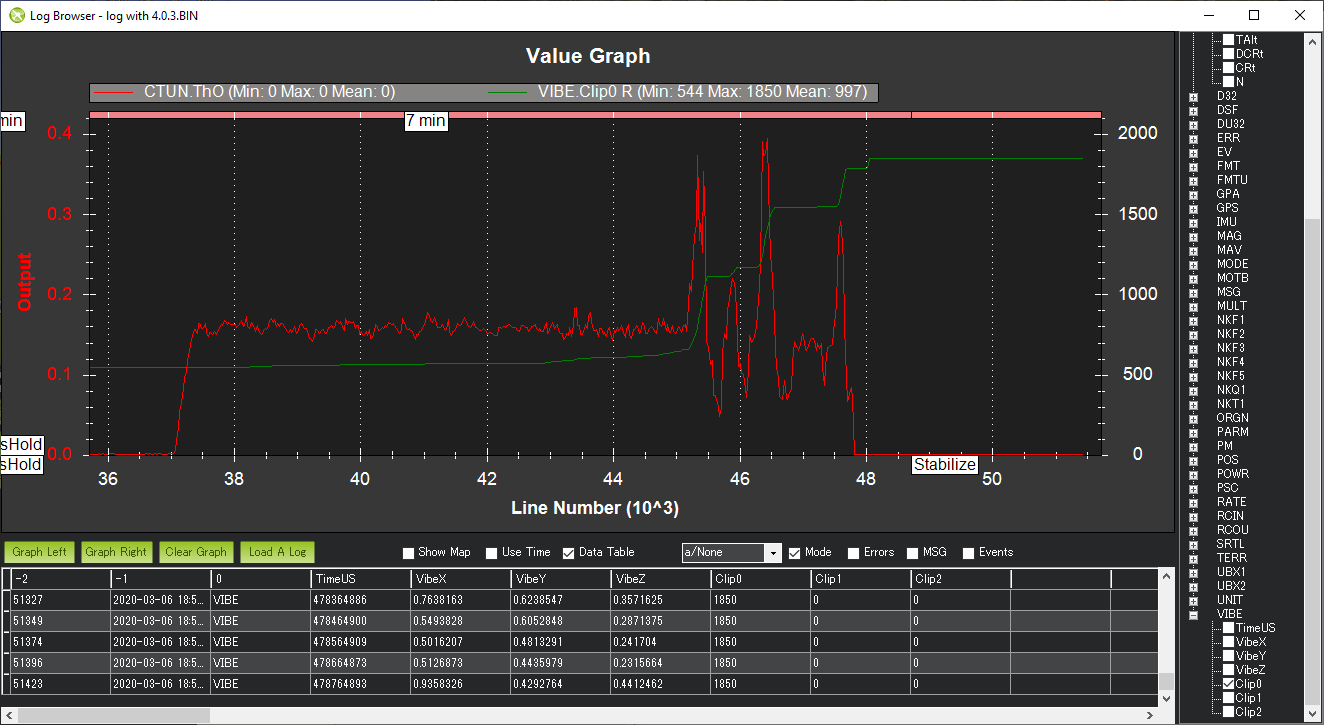
Here’s another graph of the average throttle output (in red, scale on the left) vs clipping events (in green, scale on the right). See how whenever the throttle goes over about 30% the clipping numbers rise? What this means is that as long as the vehicle is hovering it’ll be fine, but once it tries to climb it will get into a nasty loop where the high motor level will cause clipping, this will make the EKF estimate the vehicle is falling, the controllers will raise the throttle more to stop the apparent fall.
2 Likes
Vibes are marginal with clipping still indicated and tuning looks poor. Any reason you haven’t followed the basic tuning guidelines? Link posted above.
As I mentioned small craft can be a challenge to tune properly. The 3" 130 size frame quad I have was and these tuning tips were critical to obtain stable flight.
Surely make more changes and update you all
What tunning you want me to focus are the pids gain??
Just click the link and using the prop size update all the parameters shown. This is the baseline for tuning, then you can try an Autotune or manual tuning of PID.
my 2 cents remove the isolation. delete the old config and start new. do not auto tune but reduce the PIDs it the craft it twitchy. Small frames are hard to tune at times. flyaways 90% are GPS related not having good connection. remove the blue pads as your just adding more vibration cycles.
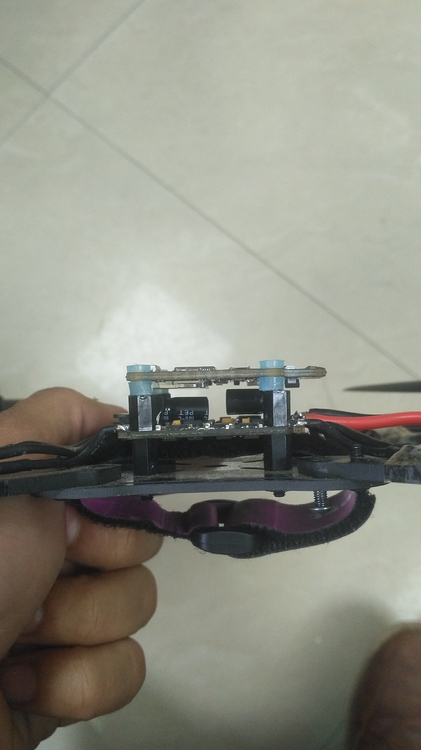
To reduce the vibration without changing much, you can add mass to the controller board - e.g. stick a few grams screw. You can’t see it in the picture but sometimes the vibrations can go from the bottom plate to the top through rigid wires that can be changed to thin and flexible as long as you don’t connect through elastic band.
Good luck
1 Like
FYI, we discussed this event on the weekly dev call today and in particular we discussed how the vibration levels are lower than we normally see in cases where the EKF loses it’s climb rate estimate.
The feedback from @tridge (who knows the most about the systems/driver layer) was that it is very unlikely that we have a configuration issue affecting the IMU for just this board (presumably because the same driver is used on all boards). There was input from a couple of developers that these small boards are more prone to aliasing (high frequency vibrations that may not show up in the VIBE log) because of their physical size. Larger autopilot boards including the Pixhawk are physically larger and this in itself tends to dampen out the higher frequency vibration.
The final advice was similar to @MarcK’s which is to add mass to the autopilot to reduce aliasing.
3 Likes
Hello all i am back with some results, I had changed many things in my frame to try to reduce vibrations and to stop the clippings, It includes Esc’s, dampers and changing the propellers(balancing them). I able to achieve decent level of vibes as you can see from the logs it also stopped clipping to too much extent. I will include four logs, in first attempt it able to hold it’s position decently as can be seen from the first log, to further improve vibration levels i did some more changes and it able to reduce the vibration clipping is also normal or close to none but as i made changes to improve the quad now another PROBLEM ARISE that it can’t able to hold it’s position in position hold mode it keeps drifting towards any random direction, this is not the only problem i faced actually for safety purpose i tied a rope to my quad during the all four test so that it can’t fly away what happens in the fourth test is that when i left it in position hold mode with all sticks in the middle position as explained in above it started drifting in random direction i left it for some while hoping that may be it’s the positional inaccuracy and may be after drifting some while it will again hold position or may be try to oscillate in a little inaccuracy but the quad keeps drifting with a bit more speed and it reaches the limit of the length of the rope and rope when tried to pull back PROBLEM ARISES quad try to fly away, i am supposing that due to that pull back again the quad thought that i am falling and it start giving max throttle to fly away i was flying it with Radio control so i quickly switched back to stabilize mode and controlled the quad but i am not clear what actually is the problem that quad doesn’t want to hold the position now please check the log thoroughly and any help in this matter is hugely appreciated.
All logs are found in this drive folder sorted numerically :https://drive.google.com/open?id=1ZQVlZy7oU-hGaWvkuffd1iijh7ofWO4A
2 Likes
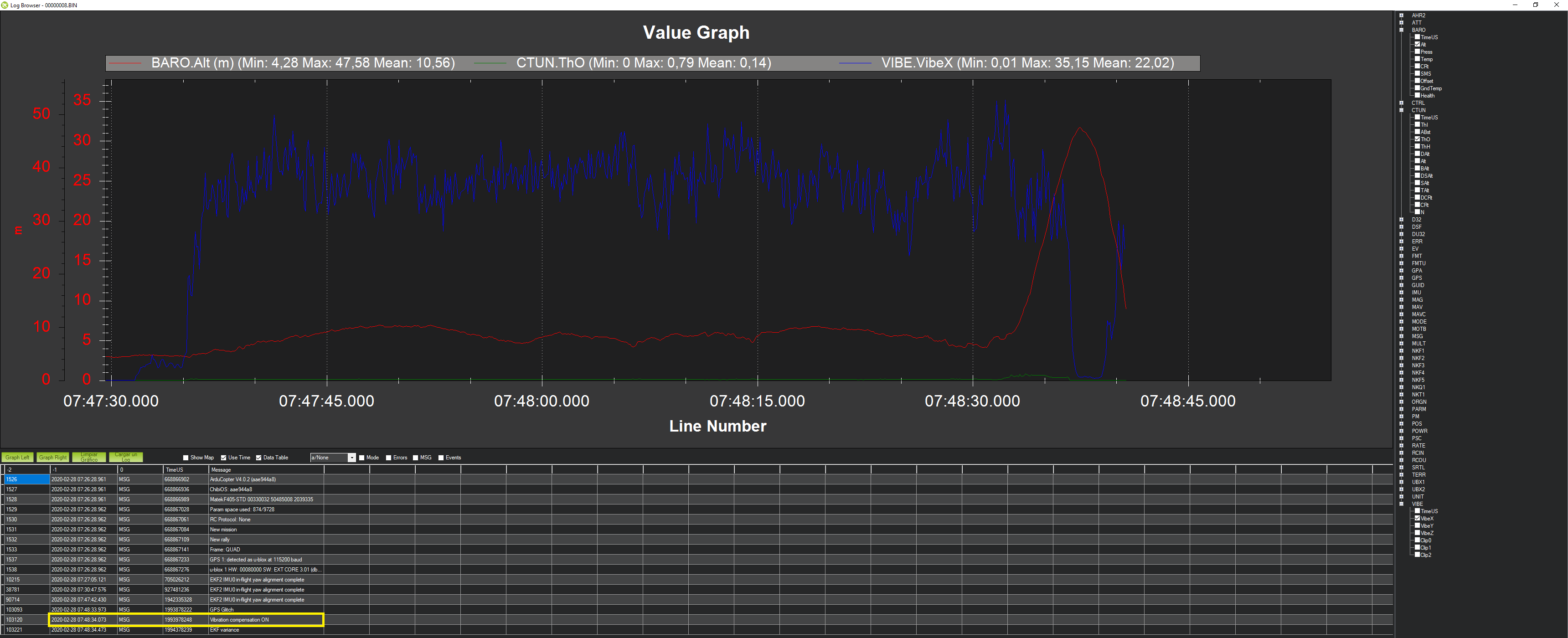

You have high vibrations and the following occurs:
·“Vibration compensation on” is triggered.
·Motors accelerated (high values on CTUN.ThO).
·Climbs up to 47.5m.
Why it is accelerated and climbs because of vibrations is a mistery others may solve.

At the end of your last log, vibrations were a bit high, but suddenly increase rapidly. CTUN.ThO also increases heavily. If you had the rope, no idea of its effect.
My drone also climbed up rapidly, I did not know why I am attaching the log below for reference.
Please guide @Webillo @Deficiant_Codger @rmackay9 @dkemxr @Notorious7, it was working fine but suddenly after takeoff, it just climbs up rapidly.
I am using 4.0.7 arducopter firmware.
https://drive.google.com/file/d/1VQYFjaH3xOpNOpCGPTKI4_uIv6GYZ00g/view?usp=sharing
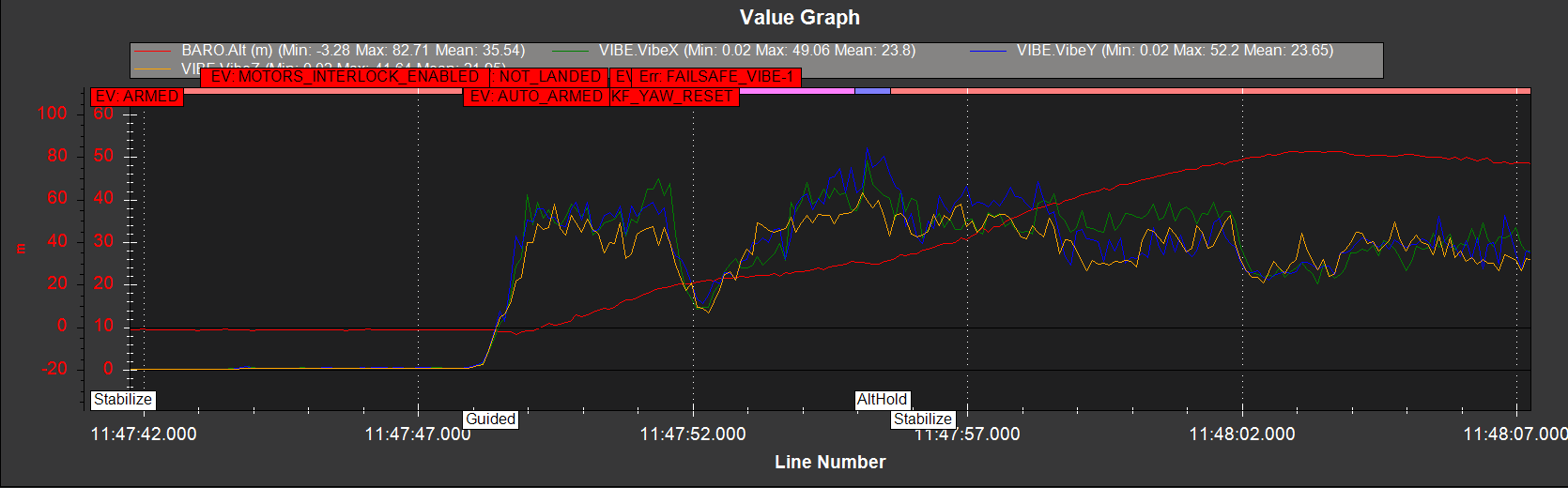
Plot the Barometer, and the Vibes and look at the messages shown. See the one that says “Vibe Compensation On”? That’s why it climbed un-commanded.
I have plotted the same as you mentioned, It is showing FIALSAFE_VIBE-1.
But what is the cause and how I can avoid it?
By a Google search “arducopter vibration failsafe” and click the top link. I’m sure you can figure out the remedy from there…
Yes, I have read the article here
https://ardupilot.org/copter/docs/vibration-failsafe.html#:~:text=If%20the%20vibration%20failsafe%20triggers,on%20the%20Ground%20Stations%20HUD.&text=Altitude%20controller%20switches%20to%20a,->velocity->acceleration)
The reason for triggering is mentioned that I can see from the graphs, but what factor causes that I am unable to find out as the system was performing fine in the last 10 flights.
The vibration levels are high. Perhaps something mechanical on the craft is loose? Cables to the Flight Controller under tension? You know, the common things you look at when vibration levels are high.
The main reason we found out after lots of digging is that
1.auto tune with all recommended settings i.e. setting up notch and gyro filters properly strictly according to your propellers size.
2. Props are the worst and the biggest contributors of vibration buy a prop balancer and check for your props balancing