I made a quadcopter with pfxmini + raspberry pi (and Ardupilot). I made a cage to protect it (see photo below).
With the drone in the cage, I used APM planner to calibrate accelerometer, compass and radio (all were successfull). ESCs were calibrated too.
I use 3 motors mx1806-2280KV and 1 1806-2400KV (I had to replace a faulty mx1806-2280KV).
I have attached 2 images of it.
That’s an old 3.5-dev version of firmware. Update to latest stable and re-do all the configuration and calibrations… And there is something wrong with your ESC calibration. It looks like zero throttle is 1500µs, should be ~1000. Beyond that you don’t have much logging enabled so can’t say much more.
Ah right Erle Robotics. That would seem to be thr right firmware target but I don’t see a Hwdef.dat file shown for that board so am hesitant to say “go for it”.
Perhaps wait a bit and see if anyone else comments.
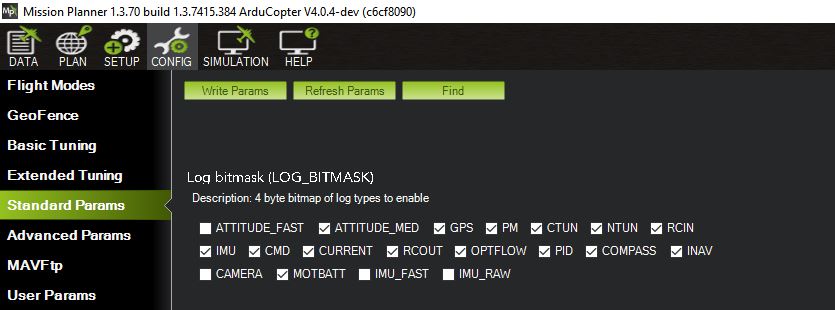
I’m not sure where the problem is with ESC calibration but if you performed it from mid-throttle to max throttle rather than low throttle to max throttle the result may be as you have shown. Take off again but in Stabilize mode and post that log. Turn on more logging options like this:
Hi
Please find a full log here : http://dl.free.fr/oRxItae9W
(in stabilize mode).
I didn’t have enough room to make it taking off. It quickly leaves in front.
I have noticed that I had to go over the middle of the stick to have the speed of the motors increased …
Cheers
Karim
PS : I didn’t try yet to upgrade the firmware
This is the problem with throttle at mid position: RC3_MAX,2000 RC3_MIN,1500 RC3_REV,1 RC3_TRIM,1558
MIN should be ~1000. So perform another Radio Calibration and if it’s the same it’s a problem with your Transmitter configuration. Before you do it make sure all the Transmitter trim sliders are centered and never move them for any reason. After that you will have to do another ESC calibration because the ESC’s learned these bad values.
With regards to it moving forward on takeoff perhaps you need to reverse the Pitch channels (2) in the Transmitter.This is commonly required.
Hi Dave
It seems better with a new radio calibration and ESC calibration. http://dl.free.fr/v3wUj1Y1a
RC3_MIN is now equals to 998.
But it seems I don’t have enough space in the room (3mx3m) …
Please tell me if you see something strange in the log file.
Cheers
Karim
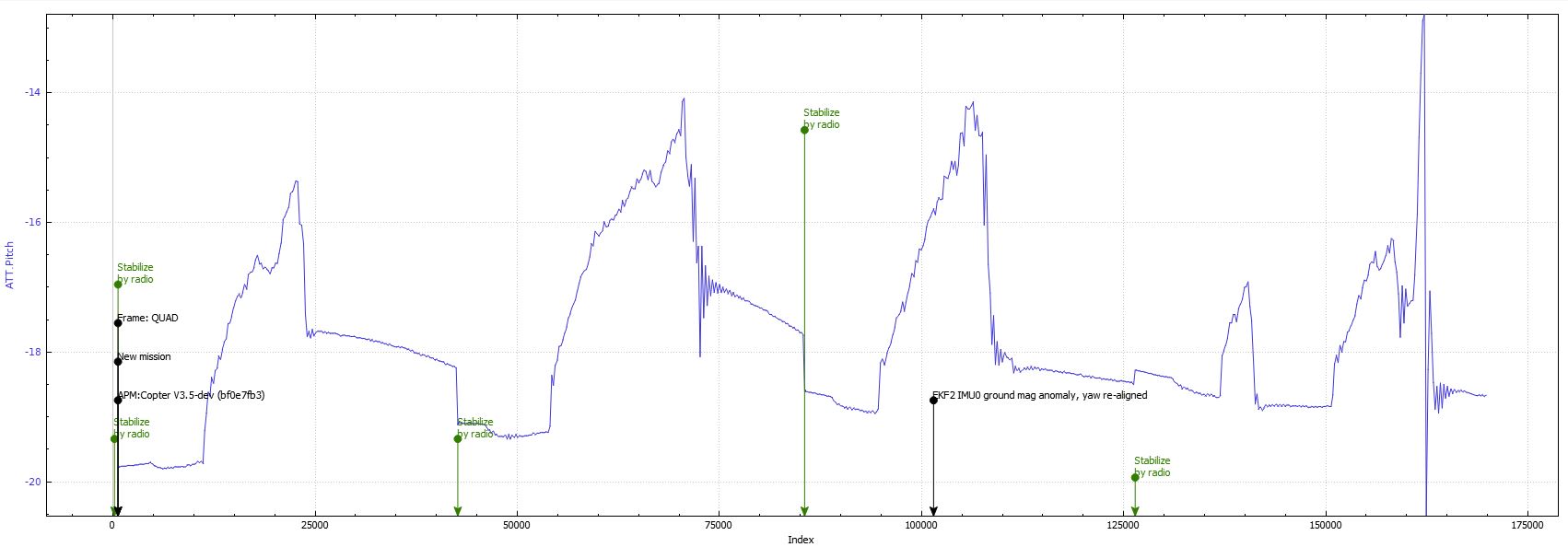
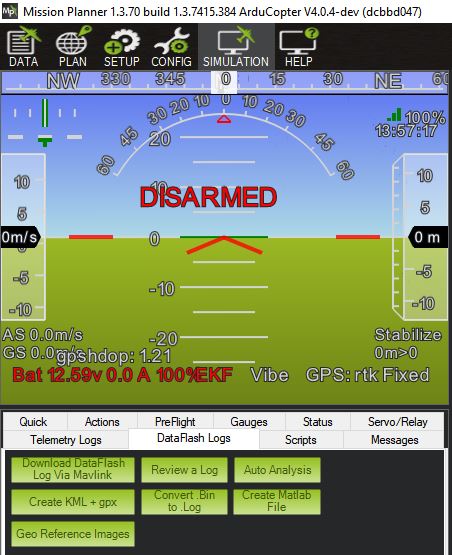
Assuming this craft actually left the ground you have a problem with the Motor Outputs probably caused but a huge Pitch offset. In the 1st graph the outputs should be roughly equal but your rear motors are not being commanded to do that. In graph 2 it’s showing a -20deg pitch at arming. So either you didn’t do the accelerometer calibration properly or there is a problem with the hardware. When the carft is sitting level and stationary what does the artificial horizon look like in the HUD in Mission Planner? Post a screenshot if you like.It should look something like the 3rd attachment.