You should have access Gabriel.
Hi Ricky,
Hope you’re having a great holiday! Was wondering if anybody had successfully flown your design yet? Would you mind sharing your file again? I have a Snoopy flying doghouse project from Otto Dieffenbach I’d like to adopt this design with. Thanks!
I am about to do FBWA, I have successfully hovered it. Pretty stable design actually
1 Like
Congratulations! I (and probably some others) would be glad to have an idea of the endurance with detailed setup and weight when you’ll achieve to make a safe transition.
Good luck!
I was doing the auto flight of the quad tailsitter and it went almost perfect. From takeoff to transition and cruise flight from waypoint to waypoint. BUT at the last moment in qRTl waypoint the quad tailsitter was descending way too slow and little off the home point ? I was scared that a 4s1p battery would sag too much and flipped it manually to qRTl and it landed perfectly. Can anyone check out why it behaved this way? Here’s the log below.
First let’s check RCOU, motors are C10,11,12,13.
Values are very similar meaning the copter is well balanced, average requested speed to ESC’s is few less than 1600pwm while hovering meaning 60% which isn’t so bad (ideal 50).
Battery, I don’t know how well the voltage is calibrated but according to what I see on BAT0 max voltage 16.18V let me presume 4S type inducing 4.045v/cell before takeoff.
Minimum 8.82v = 2.205v/cell… How is that possible?
However I don’t believe there was 2 batteries and on BAT1 max 15.42=3.85v/cell min 14.68=3.67/cell which seem more normal for a ±4 minutes flight.
Anything else I didn’t found, let’s go to auto-analysis:
-Test: Compass = FAIL - FAIL: Large compass offset in MAG data (X:-299.00, Y:463.00, Z:-83.00)
Large change in mag_field (65.70%)
Max mag field length (801.82) > recommended (550.00)
- Test: GPS = FAIL - Min satellites: 0, Max HDop: 99.99
Someone can probably do a better analysis than me…
I see the long descent from 80m to 50m and I believe I see the problem via the message “land descent started” but unfortunately it’s immediatly folowed by “final descent started”.
In parameters you can set the vertical speed of landing and final landing.
Final landing must be slower and your copter immediatly switched to it, maybe because the final landing altitude value is too high.
Here are my quadcopter params:
LAND_SPEED_HIGH = 200cm/s (landing vertical speed)
LAND_SPEED = 50cm/s (final landing vertical speed)
LAND_ALT_LOW = 600cm (final landing start at this alt)
I see that you restarted landing at 24m altitude at 21:33:07, at 21:33:20 (13s later) it switched to final landing again at 5m altitude (this is logic).
However between the slow/fast vertical speed zones (50m alt), I see the message “VTOL position1 D=33.0”.
“VTOL position1: The position1 stage is for moving between flight dominated by fixed wing control to flight dominated by VTOL control. It aims to smoothly slow the aircraft to where full multirotor control can take over. The v, d and h are as above, the additional annotation of dc is the desired closing speed on the landing point.”
Maybe your transition from fixed to hover is too slow for any reason?
Thank you for your Analysis! Yes the battery sagged alot due to the fact that it is lithium ion cells and they are lower quality. I need to get higher c rating ones. But to answer your question if you check the final landing hight it’s all default which means it is at 10 meters. Not sure if it was something else due to overshoot I am not sure.
(Edited). I also see you added more options. I think you are right, the problem is most likely in the transition phase. Maybe it can’t decide between fixed wing or hover control. I have asked the developers for more assistance hopefully they can answer my questions too. As you described I switched into QRTL manually and it was able to comeback and land easily by it self. So the landing part is okay. But before I switched over the final landing part was very questionable
I understand better, probably it’s not adapted for a vtol, or need higher voltage to drain less amps (this solution may induce to use smaller props or to change motors for lower kv).
I know absolutely nothing regarding vtol transition parameters, however a natural hypothesis came to me, maybe because this aircraft was untested yet, the transition parameters are very smooth and safe for testing and in fact too much safe inducing a very long transition time.
Anyway I’m glad to hear this design fly well despite few settings issues.
Actually I asked the Pete from the developers page and they mentioned I put the qRtl at 70 meters and it just started doing final landing at 0.5m/s at 70 meters lol. So your first hypothesis is right. I should have set it way lower
I know someone who wanted 700cm but added one more zero ^^.
It’s the LAND_ALT_LOW parameter…
Can you guys try copter tailsitter in the simulation of the Mission planner? For some reason it won’t work for me at all
I have something for realflight. Can you post your parameter file and a image of your drone?
1 Like
Hello @iampete @BL08FR i am have issue where the plane tries to move towards home point while fighting a gust of wind but it won’t come down at the last moment. Please let me know why it was hovering at 40 meters but it could not land? Could it be the faulty low voltage battery? Log .bin
I’ll try to check later but it’s surely not because battery sag. Low voltage should trigger the land mode immediatly independantly from where is the aircraft.
Something come in my mind, does it lose the gps lock when going to hovering mode due to the antenna tilt (just a question to myself, I didn’t even opened the log)?
No GPS loss but I definitely think the compass is going wild due to the orientation, unfortunately it’s unavoidable during the hover. But I can tell from the UAV log viewer. The plane was trying to move towards the home point and then to decent down. My theory is that it was struggling to hit the home position.
@Farkhod_Khikmatov
As for the previous log, I have battery 0 and battery 1 voltage, which one is the right one?
Battery0, there is 3 peaks of battery sag to 9v and even 8v for the last between 18h34 and 18h37.
Battery1, voltage stable around 15v.
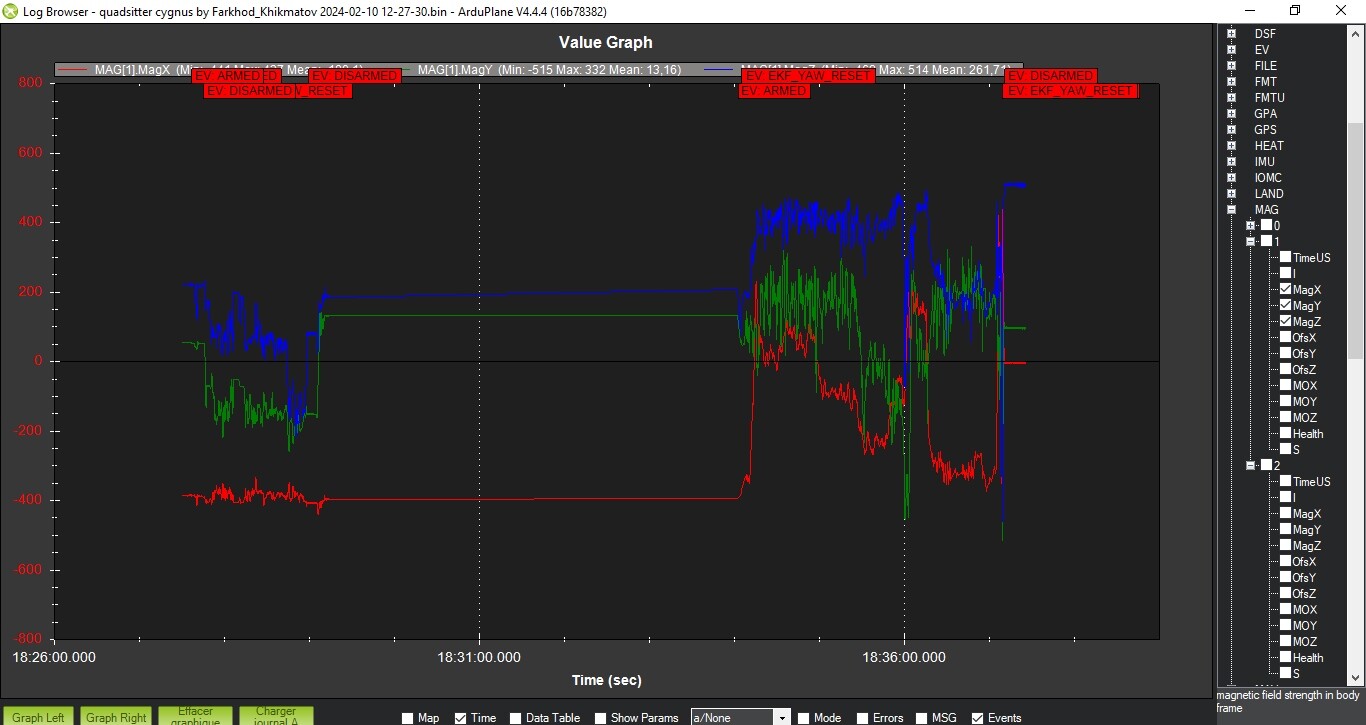
I don’t know what to say about compass (magnetometers), perhaps my skills aren’t enough to understand it but to me nothing look wrong (see picture).
At least mag0 and mag1 value are very similar.
Greetings.
I want to try to make this model. Can you tell me which flight controller is better to use?
Hey there
It was designed with the Pixracer in mind but any 30.5 x 30.5 based FC will work.
1 Like
@Farkhod_Khikmatov
I come back on what I said, probably I was wrong and you right.
If I refer to the log, you armed motors, then renouced to fly, made some calibrations and then takeoff for a short time (few minutes).
I didn’t noticed it first but there is some error messages that appeared after landing/disarming about compasses, IMU, AHRS and accelerometers as you can see on the enclosed picture.

If I’m not wrong all this is related to the same sensor which is located in the FC and lead me to think ESC’s/motors noise make perturbation to it.
By curiosity, what exact battery/ESC/motors/props are you using and what’s the weight of the aircraft? ESC’s are located near the FC?