ArduPlane supports copter tailsitters without fixed wing control surfaces…setup like normal copter tailsitter but turn oh Q_OPTION bit to force QAssist on always so that copter stabilization is on in fixed wing modes and be sure to have all motors on in fixed wing flight by The tailsit motor mask param
Also not sure about the outward toe but having opposite pairs tilted in the direction of the contribution to yaw when sped up improves yaw authority… Toe out probably improves roll and pitch authority also
Thanks for your reply.
I am a bit confused about the information from the documentation.
Currently all CopterMotor style Tailsitters do not use any yaw torque control. Roll (with respect to plane body) is only controlled by the flying surface (ailerons or elevons). Future releases will add this.
How is roll controlled in fixed wing mode?
The inward facing rotors (upper to lower) should allow good roll control just by the thrust difference between e.g. lower left and upper right motor. Same for the yaw control, because the outward tilt of the motors should increase authority.
The main wiki reflects STABLE firmware releases…the “latest” daily firmware builds, reflecting the current development branch which will be released in the future, have many features and changes, including copter tailsitter yaw control…see Upcoming Features :https://ardupilot.org/plane/docs/common-master-features.html
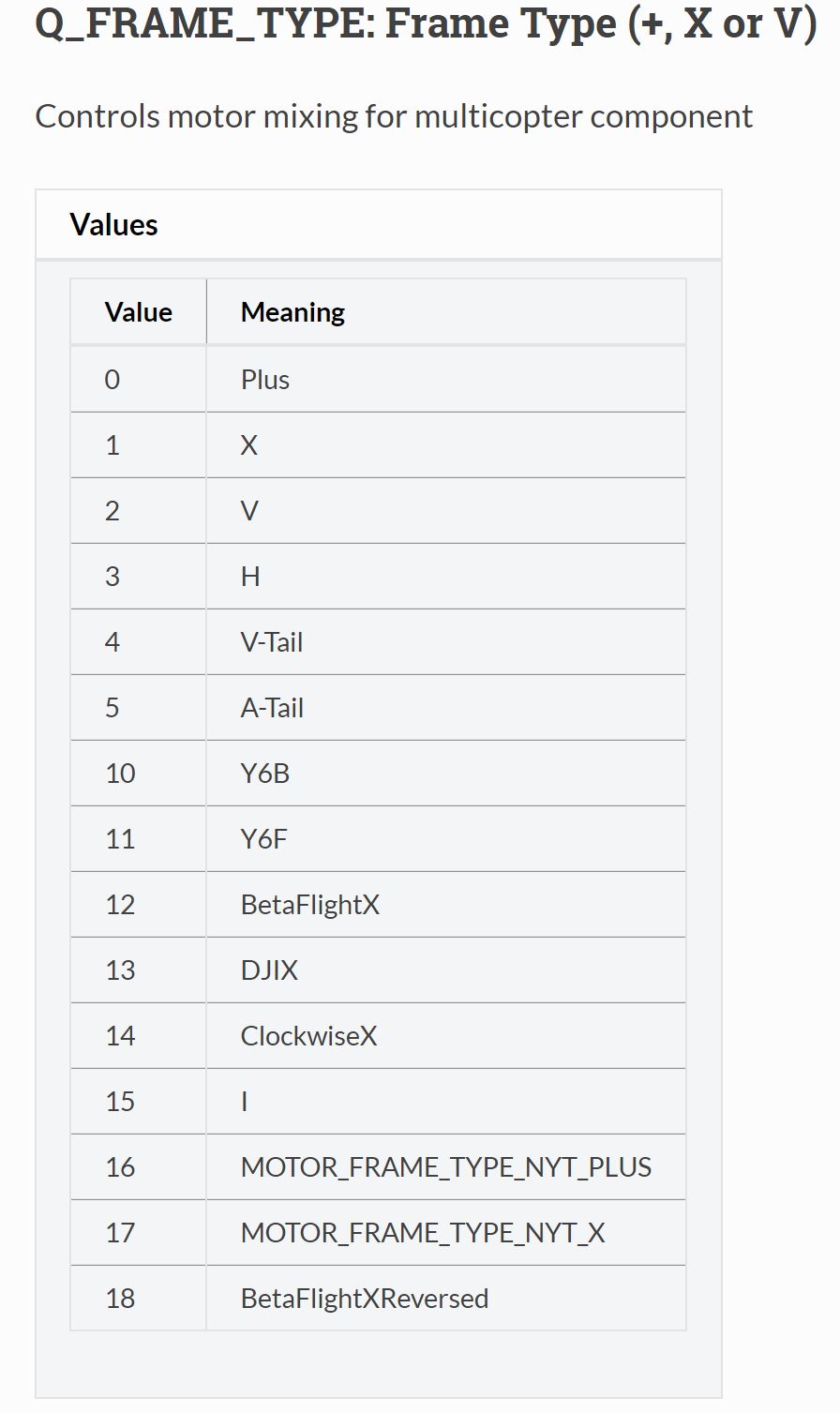
in the Plane section it has this: change note about Copter Tailsitters to read:
Note
in firmware versions previous to 4.1, CopterMotor Tailsitters did not use any yaw torque control. Roll (with respect to plane body) is only controlled by the flying surface (ailerons or elevons). Now QUAD PLUS and X frames have yaw control via motors, and frame types 16 and 17 are added that have no torque yaw control, as previous versions of PLUS and X did.
I was not looking for upcoming changes, I thought it supports it already (…which means stable for me).
But thats great, it will also take some time for me to design and build the first prototypes for that plane.
In the meanwhile I tried to run master branch via SITL and see what the motors are doing with that new frame class configuration. The problem is just, that vehicle “plane-tailsitter” reports just “bad compass variation” errors. According to the documentation it is necessary to run the initialization in “plane position” and put the vehicle in standing position afterwards. No idea how I can do that in SITL. Per default it starts standing.
Hi Henry
we can understood that Q Assist will operate continuously to assist in flight mode but the main problem I see is that there is no rc control of yow in hover as well to the quad motor Can this also be solved
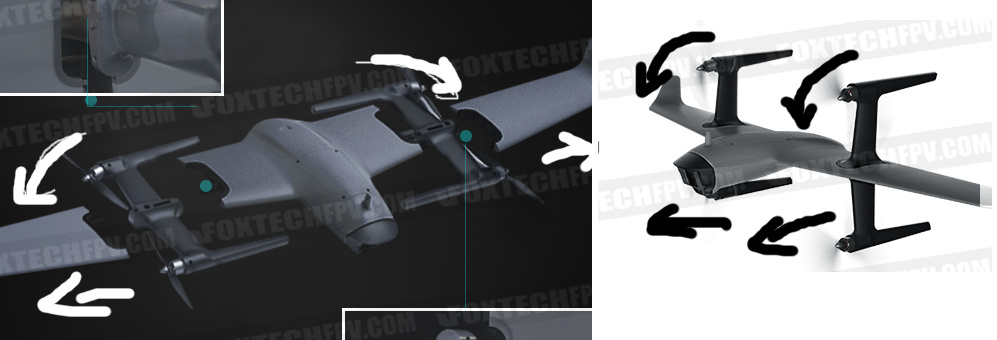
By the way the direction of the propellers rotation displayed in the wiki is incorrect for a quad
If you use latest firmware copter tail sitters have yaw control …the pictures in the wiki are for the stable version which has no yaw control… See references in the upcoming feature section as I discussed above
Currently the tail sitter frames in native sitl are broken as I recall…on @Andrew_Tridgell long list I believe …I use the SKYCAT realflight model in ArduPilot/SITL_Models/Realfligh/Released Models/QuadPlane for TVBS STIL sims
There is no tilting of motors or control surfaces on the HEC X-Wing. I also like how it breaks down for travel in the case. It’s a very cool design, just a little pricey for the hobbyist.
I’ve seen a couple of references that the H-Wing actually uses PX4. I haven’t been able to confirm however. Can Arduplane actually support this configuration with 4.1? Does it matter that this is actually an “H” configuration and not an “X” or “+”?
That statement is true for the stable releases. In master aka latest, all the copter frames are available for copter tailsitters in addition torque yaw control is available…
the param list in the wiki is by version…in dev4.1 you see the frame types16/17 which are the stable frame types 0and1…no yaw torque control…but they are moved to 16/17 in master and all other frames are supported and provide yaw torque control
I’m curious as to what your approach will be for a prototype. I am looking for a possible kit that can be bashed into a prototype h-wing. The HEQ Swan K1 looks to be a nice design with excellent break down capability. However, the price of the RTF package is a bit steep for hobby play. Even just buying the individual parts gets expensive.
Base design kit without battery is $343 . Still need battery, ESCs, flight controller, GPS, receiver, and telemetry. So, for another $300, you get a battery, case, ESCs, flight controller, GPS, receiver, transmitter, and telemetry.


 I am wrong!
I am wrong!