Hello:
I am new to this forum.
This that you have put I studied it a few weeks ago.
Seeing the high cost for testing I have designed this.
I still have a lot of work ahead of me.
1 Like
Hi Raúl,
Welcome to the APM VTOL forum!
It seems that several of us are interested in a VTOL design without deflecting control surfaces. It should be fun to pool our information together.
Cheers!
Hi Greg:
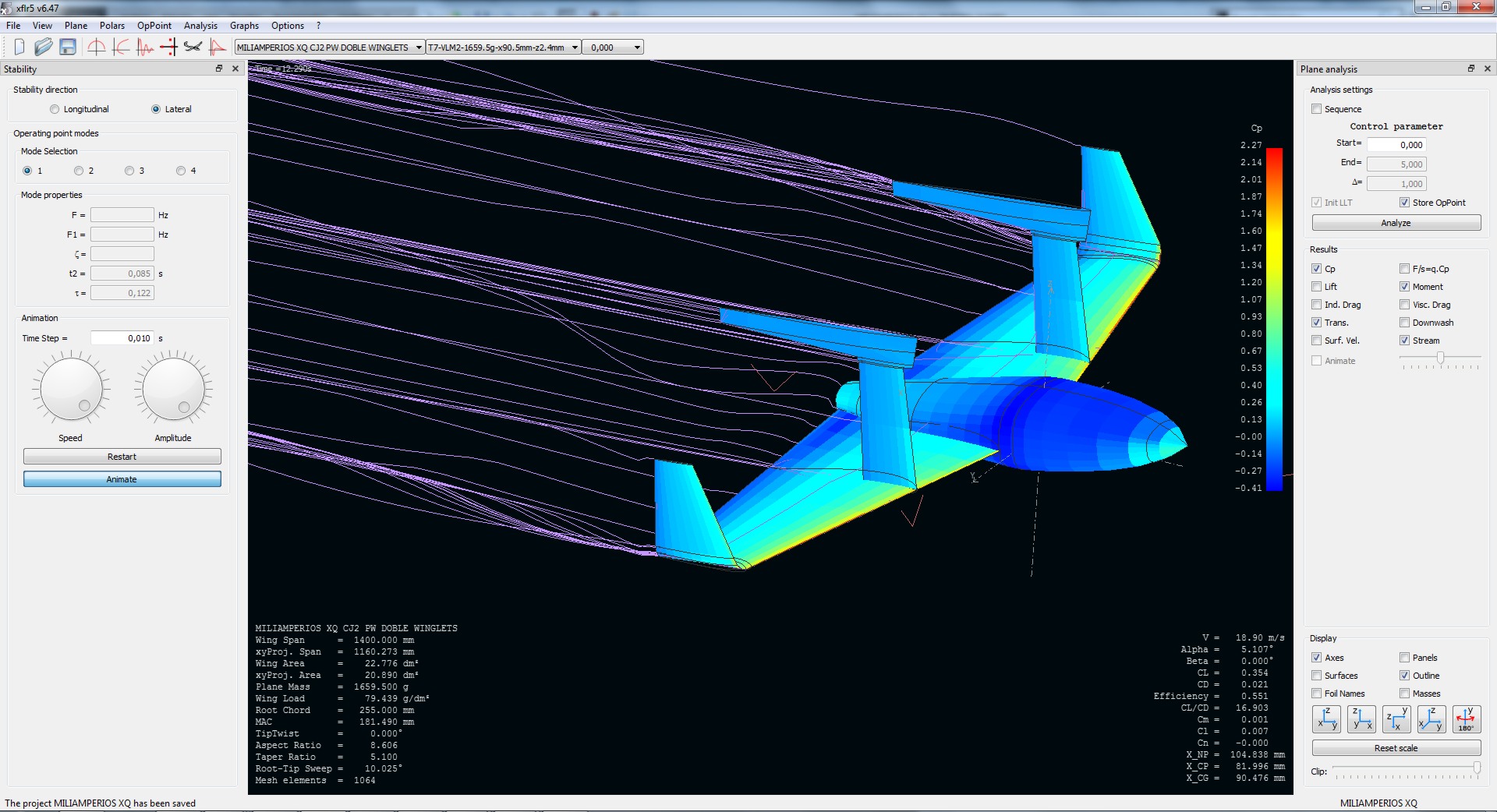
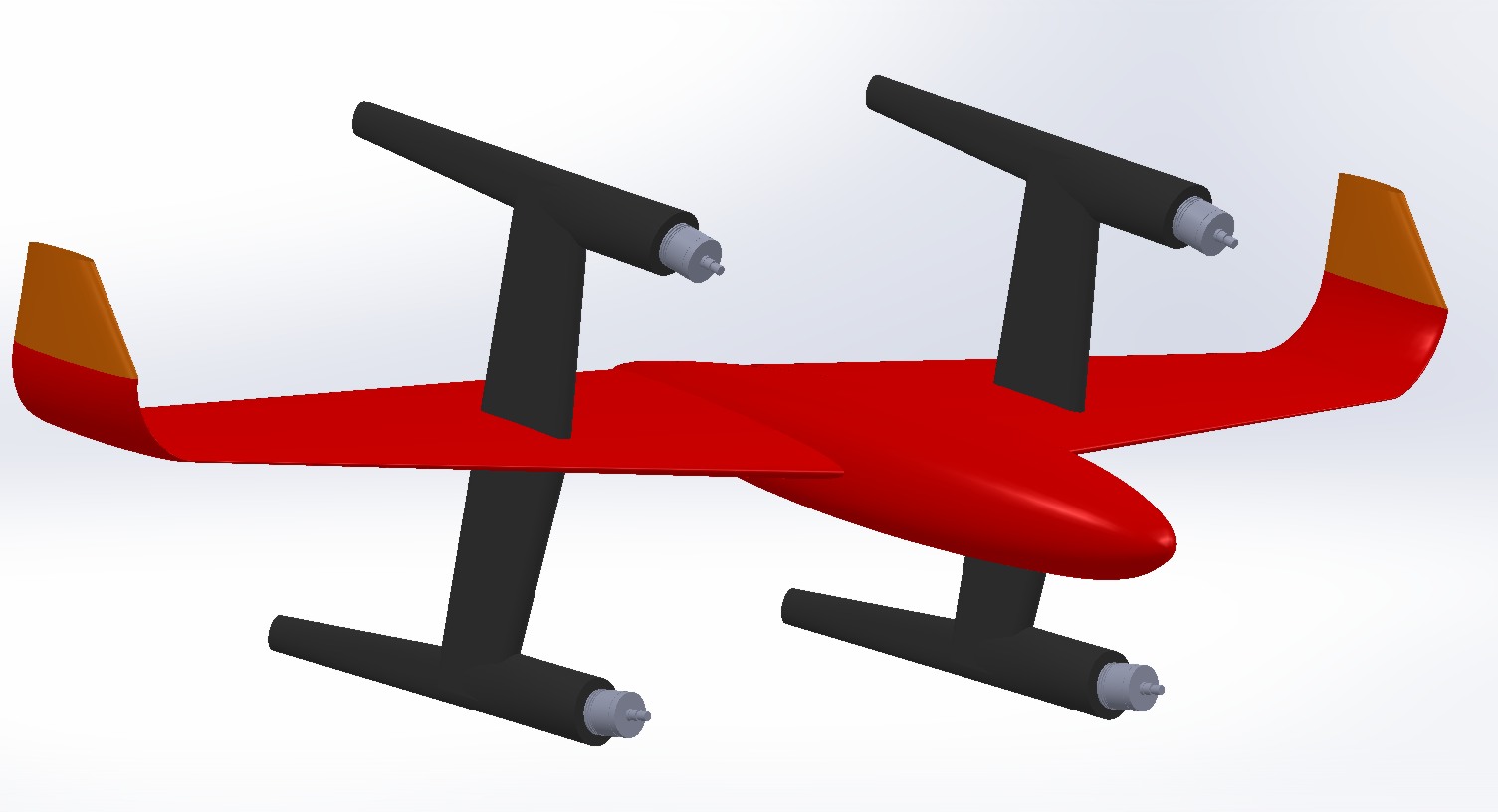
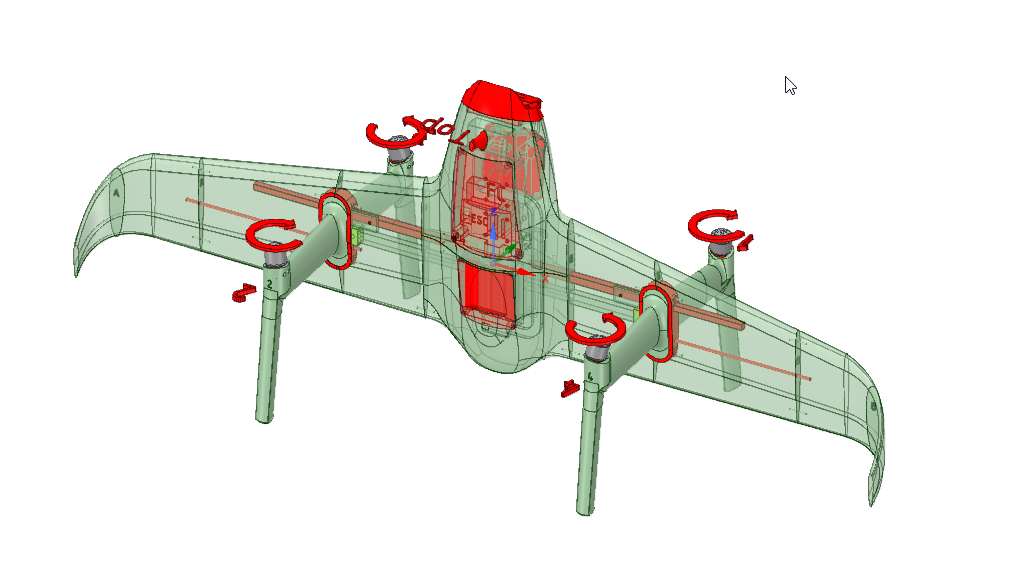
Yes, it would be very nice to develop a project with this type of frame. I have participated in the design of the prototype of this dual motor tailsitter.

I’m testing with version 4.0.9 and a pixhawk and this morning, I was disappointed, I can’t get the engines to change revolutions in FBWA, yaw a little but not pitch and roll.
What is your experience with this H-wing configuration?
These are the parameters I use.
Q_FRAME_CLASS = 1
Q_FRAME_TYPE = 1
Q_TAILSIT_MOTMX = 15
Q_A_ANGLE_BOOST = 0
Thank you.
1 Like
Welcome, what software is this?
I don’t have any experience with H-wing.
Your version 4.0.9 firmware may be the issue. See Henry’s note below from a post above.
Hi dkemxr,
[quote=“dkemxr, post:25, topic:68833”]
Flow5?
The software I use is the XFLR5 which is free.
http://www.xflr5.tech/xflr5.htm
Flow5 is the paid version.
Hi Greg,
Thanks.
Yes, I know the note, but it is curious that with version 4.0.9 I have yaw control in FBWA.
This afternoon I have tried to configure the 4 motors and control surfaces and I have the corresponding outputs on them.
I have installed 4.1 but I have not been able to do any tests.
I inform you of the results of the test.
1 Like
Any updates on this project guys?
Thinking of converting my Fx-61 …
1 Like
@tridge has made some great improvements to the H-Wing frame firmware. There may be a thread on here somewhere but I was reading the one over on RC Groups. He has posted links and videos there. Start with post #24.
There is also this thread…Swan K1 TAILSITTER FPV VTOL Official Released - RC Groups
and the wiki page on it… SWAN-K1 HWing — Plane documentation
its still being improved with a pending PR or two…
note that support is only in “latest” at this point
1 Like
Thanks guys, decided to go the other route, ordered the Atomrc Dolphin, which seems to be a great candidate for the classic quadplane conversion. I like the idea of using the small motors and a separate small battery for the quad mode and then using the Li-ions as the endurance power source
Hello Everyone:
Thought I’d check in before going out and trying to crash this thing.
I’ve put together a tailsitter from an old short wing RVJet fuselage. The prop’s rotational plane is just slightly ahead of the wing’s preferred C.G., not unlike the Foxtech H-Wing(?)
-FC is a Holybro Durandal running Plane 4.1.2
-Motors are Sunnysky X4108 with 15in props and the motor geometry isn’t square, a rectangle with long axis top to bottom - 18in wide x 23in tall
-Radio gear is Frsky 900mhz
The Q setup:
Q_Enable = 1
Q_Assist_Angle = 30
Q_Angle_Max = 3000
Q_Frame_Class = 10 ( tailsitter )
Q_Frame_Type = 1 ( X motor layout? - per Wiki CW/CCW motor diagram )
Q_Assist = 90deg ( that’s one of the questions I have )
Q_Assist_Speed = 100 ( second question )
Q_Tailsit_Input = 0
Q_Tailsit_Motmx = 15 ( motors 1-4 active )
What I’m hoping here is this setup will - allow for a VTOL takeoff in QSTAB, at altitude switch to FBWB, transtioning to wing borne flight, fly around with pure prop controls, transtion back to VTOL overhead switching to QSTAB, and a smooth landing.
The first question I have is for the setting Q_Assist. Does setting the param to 90deg mean I will have prop assisting control throughout the entire flight?
Second question does Q_Assist_Speed to 100 mean the props (and thrust) are available full time?
Third is whether or not the ELEVONs need to be in play, how they will assist control or interfere (mainly from my possible over-control). Right now, setup for AIL and ELE trim.
Still have a compass swing and motor test to go.
Any insights are appreciated.
Ron
First, there is no param Q_ASSIST…Q_ASSIST_SPEED/_ALT/_ANGLE are the only ones…and determine when assistance in a FIXED WING mode (ie the motors act as VTOL stabilizers) is activated…
Having Q_TAILSIT_MOTORMX set makes this a copter tailsitter, having elevons will be needed in fixed wing modes unless you FORCE ASSIST to be active all the time. This is done either by a Q_OPTIONS bit or by RC Aux Switch…read the wiki Assisted Fixed-Wing Flight — Plane documentation which explains all these parameters…If you have elevons, I would suggest using them…if not, do NOT set the servo outputs for AIL/ELE when the plane obviously has ELEVONS!
You could disable the servo outputs (SERVOx_FUNCTION=0) but if the plane has elevons, you will have more control if you use them and you wont have to rely on ASSIST being active all the time.
If you decide to not use the control surfaces, in addition to forcing ASSIST, I suggest you enable AIRMODE also, since zero throttle in fixed wing will result in loss of control…
AirMode — Plane documentation …with control surfaces setup, its still a plane at zero throttle and controllable
Hello Henry:
Thanks for the input and will look at AIRMODE.
Mis-typed the “Q_Assist…” Should have been the Q_Assist_Angle.
hello everyone.frankly, I’m a beginner at arduplot. can I make this plane with pixhawk?
i definitely want to try it, I have a radiolink pixhawk
Hi all.\Sorry to jump in all of a sudden.
I was curious where the GPS is mounted on a tail sitter. Is it pointing up when in it’s tail…like in a landed position or is it on it’s side so that it points up in plane flight.
Or is there two GPS one in each orientation.
I want to start printing my Swan Clone ISH and suddenly thought…where does the GPS go.
3 Likes
on the Swan its under the top canopy pointing up when in Fixed Wing stance…the GPS will obtain lock even when the antenna is not pointed up, assuming its using a large and not micro ceramic antenna…do not use the 25mm sq ones…get a normal sized one…and be sure your compass is as far from the motor wiring and battery as possible…on the Swan the GPS/compass is about 8 inches from anything motor or battery…and it still needs to have a MAGFIT done on it to get good compass readings…
Thanks Henry I appreciate your prompt response and guidance.
I designed my machine to have the GPS in the same location as the Swan. But was puzzled by orientation. Also if it has a compass on board I assume the software must understand that the orientation has changed and take that into account.
When you talk about GPS and not the 25mm type do you mean one say like this
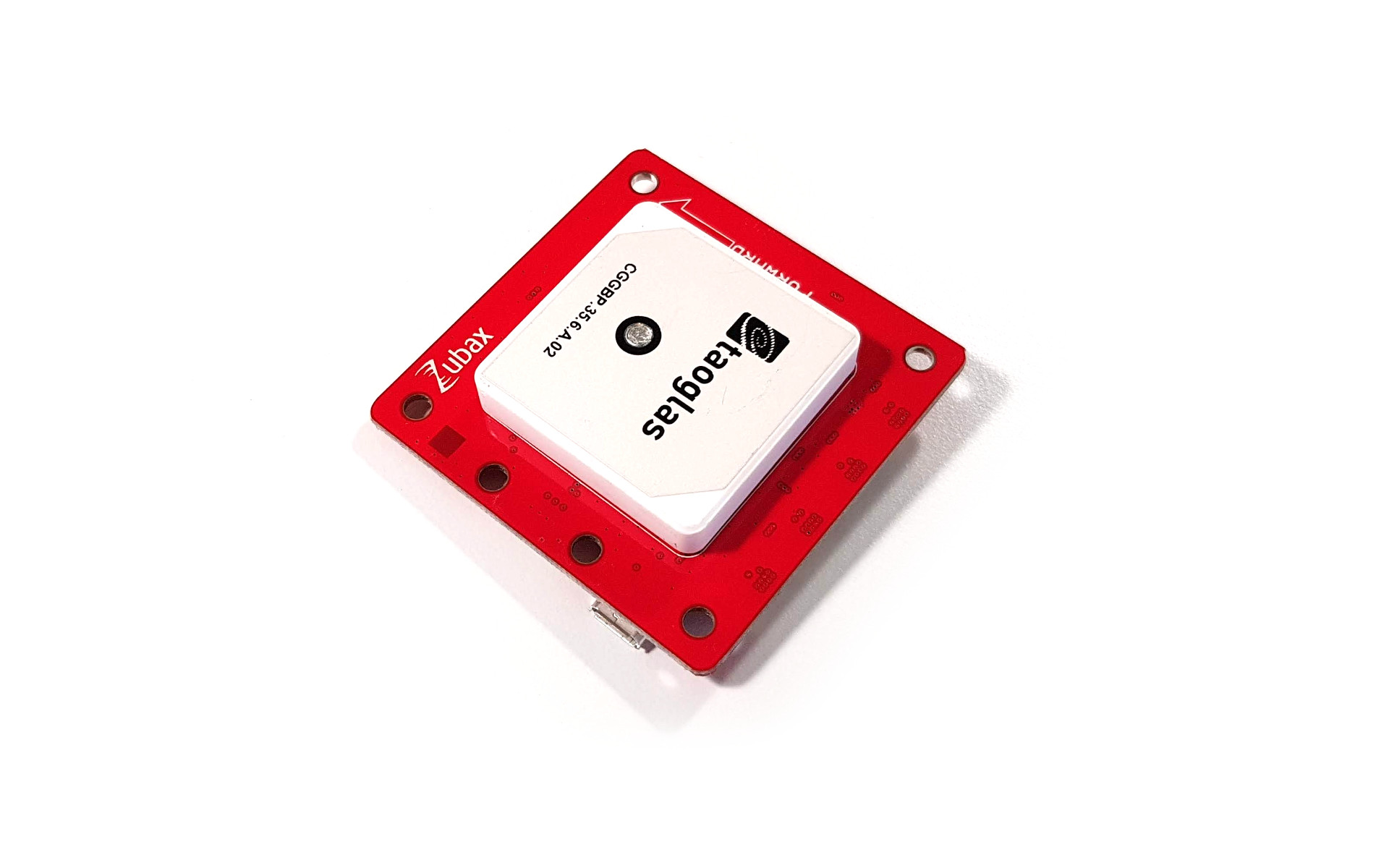
The Zubax is a large format GPS. I have a few of them. Work great but not small by any stretch of the imagination.
I guess I will start printing next week.
1 Like
the compass orientation is automatically determined when you do the calibration step…