There is no hardware that is really better or worse for a specific vehicle type, good stuff will be good for all bad stuff is bad for all. For compasses good placement and calibration is probably more important than having a nice compass, ideally you would have both of course.
yeah will be fine, worth setting you GPS_POS_ params
Hello, my DM Tailsitter maiden flight was not happy. it was only a few seconds, takeoff OK in QSTABILICE but immediately I noticed that attitude was not correct, then I switched to QLOITER mode. DMT turned back, 130º pitch up and fell to the ground. The break has been only foam and I will have it ready quickly but first it is necessary to know what happened.
Before takeoff everything was correct; EKF3, HDOP, etc …
After takeoff in the log it is observed one error: TUNING: ERROR xx. I have configured tune on transmitter-based tuning but I did not slide the knob by reaching the mid-point to activate tuning.
And also EKF YAW RESETxx error appears; the compass is away from sources of interference and strict calibration with COMPASS_CAL FIT = 4
I do not understand 100% of the log.
MAG> MagX / MagY / MagZ some variation is observed but I don’t know if they are considerable
https://drive.google.com/file/d/1rTRPq51VQpm94ZqAbKDDTxJGOKZk3PRL/view?usp=sharing
This is hard to know !
I do not see in your log an attitude estimation problem or any sign of compass interference …
EKF yaw reset is a message I get numerous time without problems.
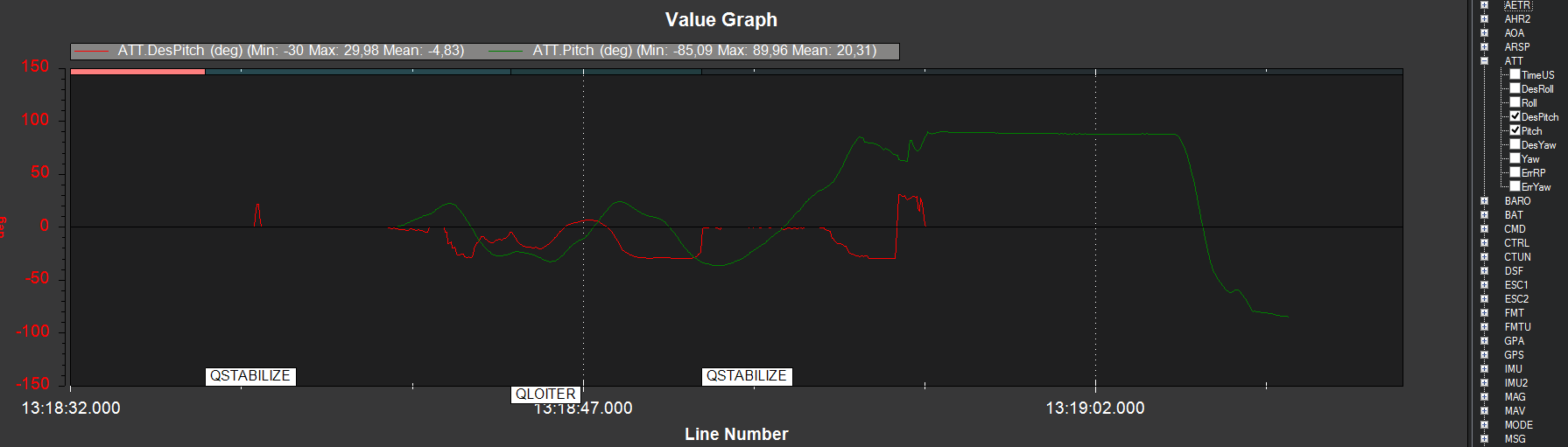
If you compare desired pitch to pitch your will notice a large mismatch. Your plane seems to have not enough pitch authority. Can we have more information about it, a photo ?
Yes, the log doesn’t really seem to indicate interference in compass.
Yes, there is a difference between DesPitch & Real Pitch > Any suggestion? I will move the CG to the back a few mm. As plane is testing in FBWA and the performance and flight was OK.
Have you never had problems with EKF_YAW_RESET? I’ve always thought that you have to consider it.
This is ToroSentado (SittingBull)  It is a betatester prototype
It is a betatester prototype

1 Like
Really nice plane, and well chosen name ! With such geometry It should hover perfect. Elevon throw ? Servo speed ? It would be interesting to hover ToroSentado to observe elevon mean position, to know if the balance is good. I will look at parameter list.
Depending on airfoil, the CG should be set to get a static margin in the range 3 to 7 %. The lower the better but 3% is already very risky for plane mode.
About EKF_yaw_ reset, I really dont know but this is a message I have at least one time every flight without problem. Some time ago I had a vibration problem that caused accelerometer aliasing. I got several (more than 20) ekf_yaw_reset in a row (and unstable behavior) but I think this is not your case.
I have plotted Ahrs pitch vs xkf3 pitch vs xkf6 pitch and they match perfectly. This is, I think, an indication of a good attitude estimation.
I already read your comment on static margin; I think it meets this code.
Do you want to say this?
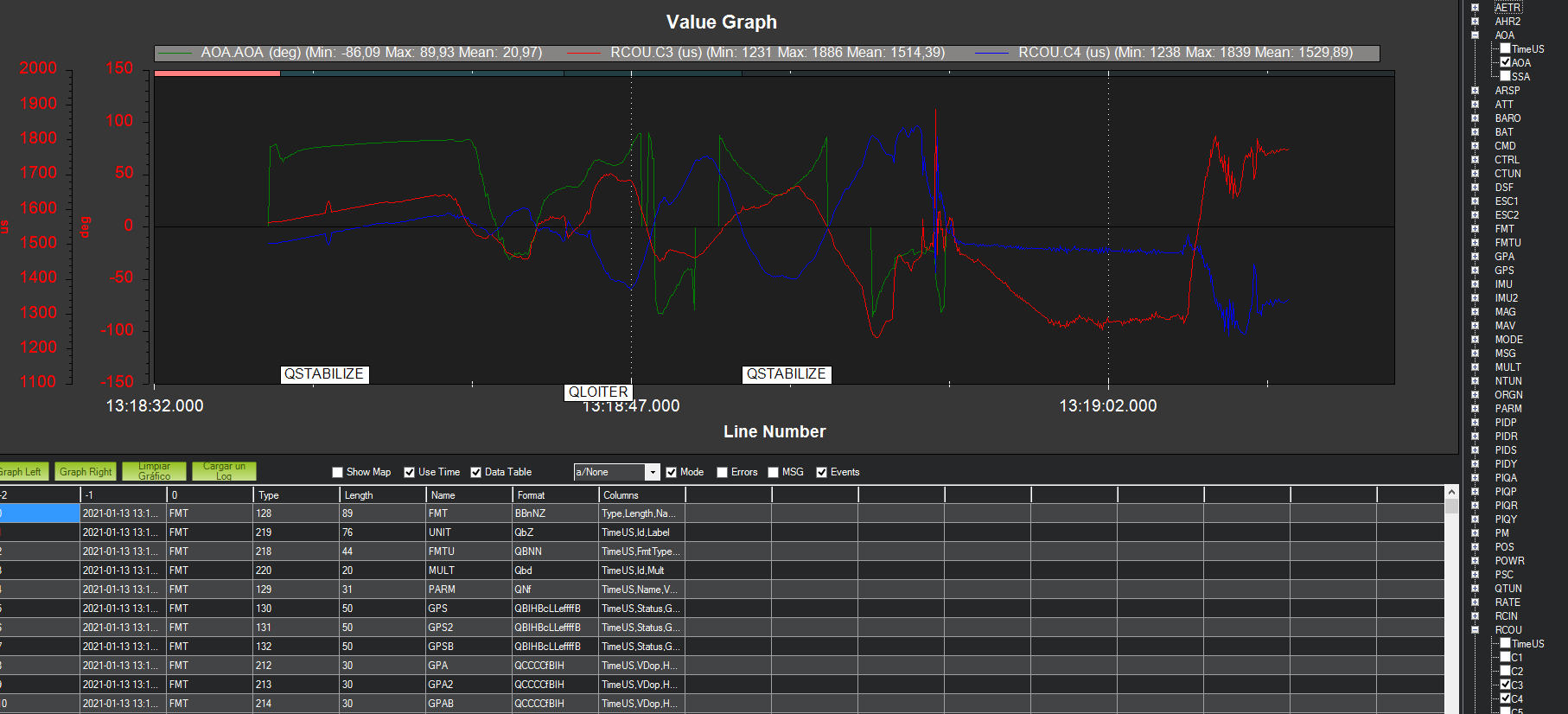
you mean compare AOA & RCOUT (C3 aileron L and C4 aileron R)?
If aileron point down, put CG more to the nose.
If aileron point up, put CG more in the rear.
Repeat this until you find the CG spot where aileron stay neutral even at high AOA .>> = NP.
In FBWA showed a value of PIDP.I around zero
maybe I should increase Q_A_RAT_PIT_D. I decided to start with a low value 0.001
Ah , the servos are Savox SV-1260MG > 12 kg & 0,55seg/60º. I think it is enough for these ailerons
I just mean that elevons should be close to neutral when the plane hover vertical. For example, my blue wing hover with elevons tilted 10° downward, I chose to mitigate this behavior by tilting motors downward. I could have tried to move battery downward (relative to plane Z axis) but that was not possible.
I agree provided the plane is in FW mode and CG stay in acceptable range.
very good. From my side, when tuning a plane I always make a straight line without tx input and after landing I look at log to compare elevons mean position during the straight line to neutral position. You can make the same test by switching to manual but from my side I had a bad experience with manual mode and I dont like to make this test early.
PIT_D should not be too high as it quickly produce oscillations. 0.01 to 0.005 is correct to start. I have no idea to tune PIT_D correctly but I think most of damping come from aerodynamic forces (this is obvious for yaw axis but more subject to discussion with pitch) and that may not be critical provided PIT_D does not produce oscillations.
You have PIT_P=0.2 and this is probably a little low. This is the parameter to begin with and you may want to increase it until oscillations (and then reduce it a little to cope with more airspeed).
I found recently that PIT_FF improve pitch stability. I have now 0.4 on my blue wing. You may observe that the wing return to vertical faster with less hesitation. But beware, too much FF and the wing overshoot vertical position.
PIT_I could be higher too. You may observe on logs that sometime (at high lean angle) I is limited by Imax. So higher I and Imax could be better.
OK, in your example you mean move the battery to the belly of the fuselage, not to rear CG this is so?
I will observe the position of the ailerons in tilt displacement and if it is necessary to increase the motors incidence.
I will increase PIT_D to 0.005 and also PIT_P to 0.25-0.30 and PIT_FF to 0,4 and I will test.
thanks for the tips
@Iampete, How to get master 4.1 dev for Matek F765 with these two new features?
As soon as I get an acceptable Hover flight I would like to test the transitions with Disk Gain and these two new implementations.
Ctrl + q on the Mission Planner load firmware page, it is the dev version and is not as well tested as stable, be careful ect.
@losawing there is Q_TRIM_PITCH to correct that problem, although obviously it would be better to play with the C.G. if your tailsitter remains perfectly vertical at 10°.
Only 3° would be enough for mine, but pay attention to this parameter.
At the moment I have 4 open issues regarding tailsitters and these two are the ones that prevent me from proceeding with the tests, there is something to fix… 
Hello guys,
I’ve been following the topic for a few months, it’s a lot to read …
6 months ago I became interested in the topic VTOL TAILSITTER, previously I had never been interested in airplanes, only multirotors, I have already built 1 quad with APM and 1 hex with Pixhawk.
Well I decided to face the challenge and I’m setting up a TAILSITTER based on the design and shapes of WINGTRA ONE.
I will use an FC Matek Systems F765-WING.
I have 2 questions:
1st Has anyone tried OPTICAL FLOW & LIDAR SENSOR (http://www.mateksys.com/?portfolio=3901-l0x) to assist in tak-off and land?
2nd Have you tried the air speed sensor (http://www.mateksys.com/?portfolio=aspd-4525)?
If anyone can tell me what settings are needed to use these sensors, I am grateful.
Have you seen this:
2 Likes
Well integrated : hidden or no servos, easy to deploy, lightweight. Looks like phantom 4 pro motors. Interesting !
Hi Otto,
with this you immediately tempt me to take an old Z84 Wing Wing and put 2 aluminum profiles vertically through the wings. Let’s see 
Rolf
Nice Product, yes. But pay attention with this TX System. It’s based on Skydroid t10, which is no longer
on the market. I had at first an issue with the Map. After some monthe the Map was no longer to see.
And yesterday I tested it after long time, and now the Cam view also didn’t work. The App is available on
google play, but verry old and never updated.
I tried to use the App of above H-Wing and amazing, Map and Cam worked. But of course not the telemetry because its probably another flight-controller.
Would be interesting if it works also with Arduplane without Elevons.
Good luck.
last 15 messages of copter tailsitter thread is about this hwing Vtol. You will have to use qassist feature to fly this wing. Hope to see it soon.