Can someone point me in the right direction of what parameters to adjust for quad rear props lifting the drone to almost flipping over. Video and Log below. Thanks in advance
LOG
Video
Can someone point me in the right direction of what parameters to adjust for quad rear props lifting the drone to almost flipping over. Video and Log below. Thanks in advance
LOG
Video
ArduCopter can not do that, only beta flight AFAIK
Fly in Acro unassisted mode?
No that was stabilized mode
Ardu can not do what was in video. That was Ardupilot in stabilized mode
I feel there could be a misunderstanding. Do you want the drone to tilt forward in punchouts or do you want to fix it so it doesn’t tilt forward on punchouts?
If you want help to fix it, you might also want to remove the access restriction on the log file…
Sorry for misunderstanding. I don’t want the quad to lift during punch outs while in stabilize mode and my fault did not realize my log file was restricted I’ll post an updated link below.
Log
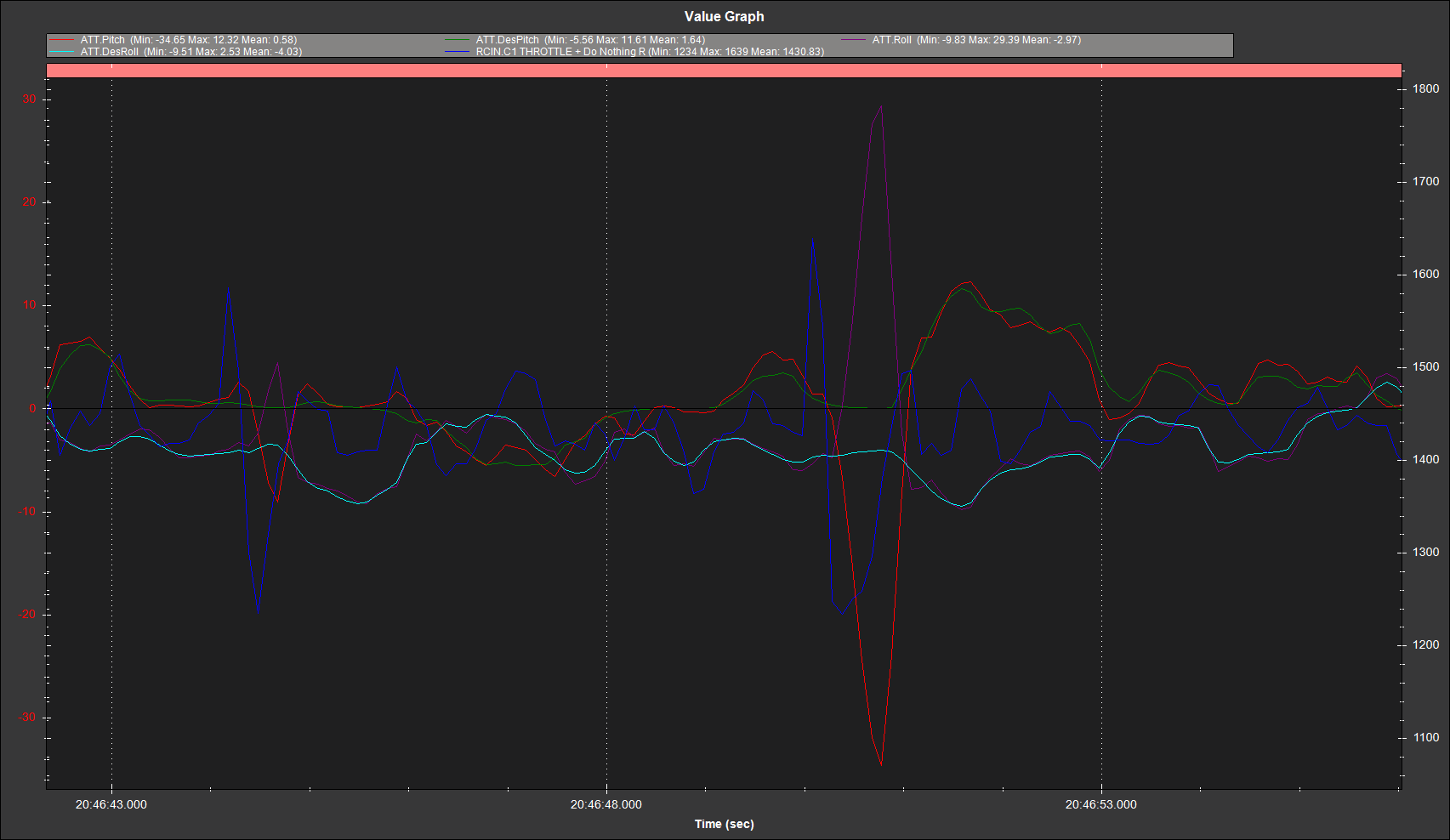
The large difference between desired roll/pitch and actual roll/pitch only happens after you let go of the throttle. The drone is stable during the punchout itself and it levels out after you give it throttle again.
Instability at low throttle can be an indicator that the MOT_THST_EXPO value is too high, try reducing it to 0.61 (based on the new formula in @xfacta’s Initial parameters spreadsheet for 11" props).
Apart from that you are missing some important calibrations, that are not immediately responsible for this particular problem but may cause problems in the future. For example you are missing the IMU temperature calibration and your ATC_THR_MIX_MAN, PSC_ACCZ_I and PSC_ACCZ_P parameters don’t reflect your MOT_THST_HOVER parameter.
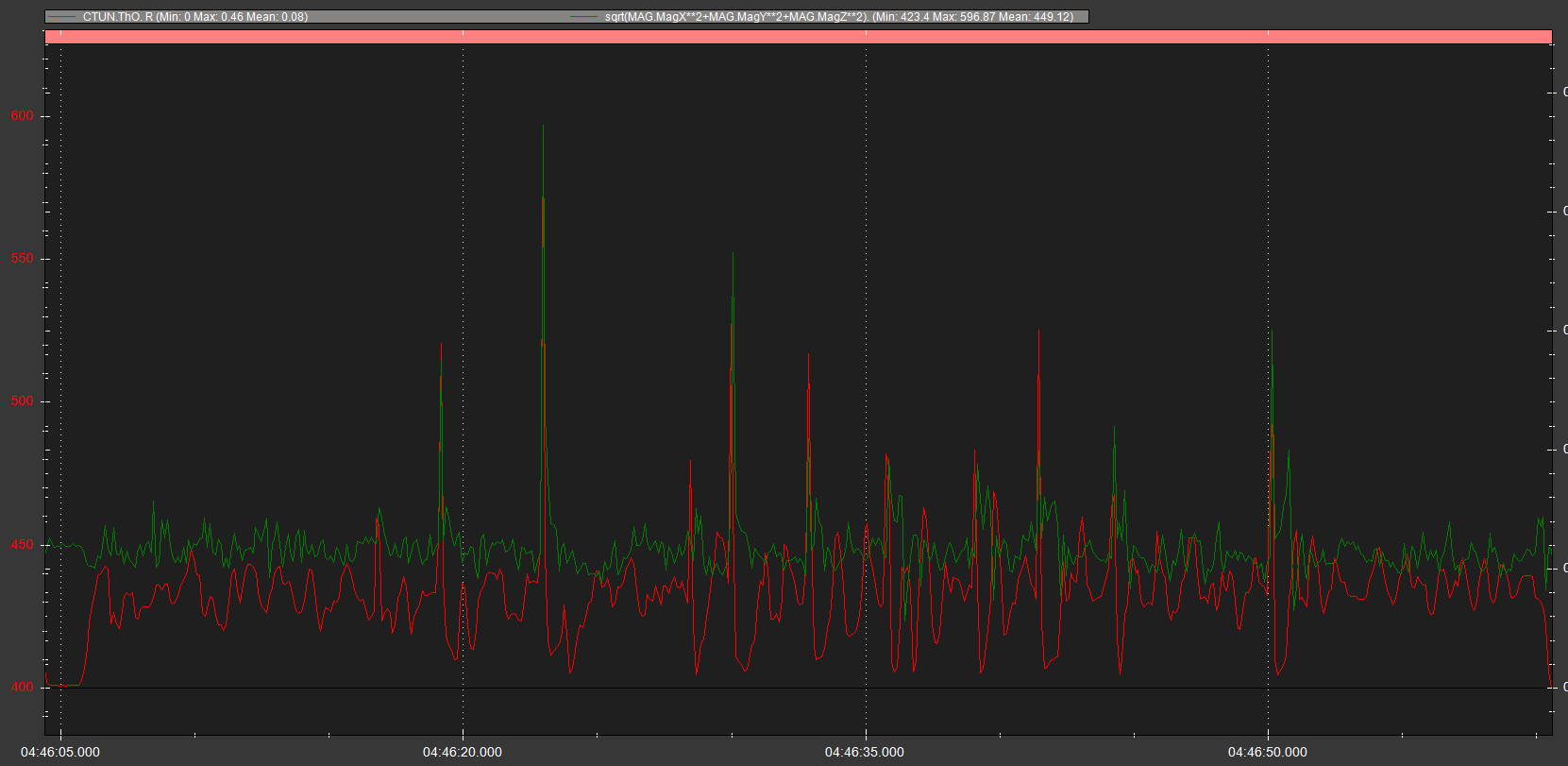
OK, there’s a bit of a tuning issue but I think the main problem is the compass.
You’ve got just one compass, in the flight controller, and it is definitely being affected by throttle (current through wires).
Is there a way you can get your current sensor working properly?
It’s reading a value that doesn’t equate to actual current - this will be mandatory when using the on-board compass.
Then we could use magfit to calibrate the compass to allow for the current flow and changing magnetic fields.
When you have the current sensor working, do a test flight with plenty of yaw and circles, ascents and descents, then supply that log file.
You can set these too:
ATC_THR_MIX_MAN,0.5
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
INS_HNTCH_OPTS,1
INS_LOG_BAT_MASK,1
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
Your harmonic notch filter is misconfigured too. Some of the options you selected wont work without the ESC data, or are not very effective just with a throttle-based notch. Some is quite wrong.
INS_HNTCH_ATT,80
INS_HNTCH_BW,125
INS_HNTCH_FM_RAT,1
INS_HNTCH_FREQ,80
INS_HNTCH_HMNCS,1
INS_HNTCH_MODE,1
INS_HNTCH_REF,1
should be more like:
INS_HNTCH_ATT,40
INS_HNTCH_BW,40
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_FREQ,80
INS_HNTCH_HMNCS,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.11
You could also set these now even though they will need further adjustment, because your existing notch filter settings wont be working as intended.
We will know more once you get the current sensor working, set all those other parameters, and do another test flight as requested.
If you can get bidirectional DSHOT working (easy) or get the ESC telemetry working (harder but more complete) then your harmonic notch filter will be “set and forget”
INS_HNTCH_BW,10
INS_HNTCH_FM_RAT,1
INS_HNTCH_FREQ,80
INS_HNTCH_HMNCS,1
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,2
INS_HNTCH_REF,1
To enable bidirectional DSHOT just set this since you already have the firmware:
SERVO_BLH_BDMASK,255
SERVO_BLH_MASK,0 this was wrong and not needed anyway
SERVO_DSHOT_ESC,1 or 2
What motors, props and ESCs do you have?
I’m checking because there might be a few more things that need adjustment.
Thank you I will test flight with changes in the morning!!
Motors are xnova 3220-450kv
Props Gemfan 2 Raw 11inch props
Esc’s are APD’s 120amp
FC Lumenier LUX H7 HD Ultimate Flight Controller
Also I’m using the Matek M10 Peripheral GPS with DRONECAN parameters.
For 11 inch props you should use this thrust expo:
MOT_THST_EXPO,0.61
I think you had all other related parameters correct.
I see now in the log the external compass is detected and used - there is no internal compass.
But of course it still needs better calibration due to the interference by current (magnetic fields).
having issues with
SERVO_BLH_BDMASK,255
once set one of the esc’s particularly motor 7 is not working as if its not receiving signal. Not sure if the grouping of channels is wrong
i believe the fc should have a compass
https://drive.google.com/file/d/1JCreYqvQMfARzNMyTkPA4gpaTk1XhrD0/view?usp=sharing
According to your previous log you have motors on SERVO1 to SERVO8 outputs, so that should be the correct bitmask.
The only other thing I can think of is one ESC has earlier firmware on it.
Ok let me check on that thru APD passthru
But if i unplug then plug back in it works fine SMH wierd
Try BRD_BOOT_DELAY,3000 and see if that helps. There is no detriment to leaving it in place even if it has no effect in this case.
ok will do. Thanks Ill follow up with logs tomorrow!!